Соединение с тремя призматическими и тремя вращательными примитивами
Суставы

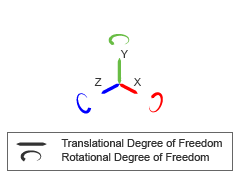
Этот блок представляет соединение с тремя поступательными и тремя вращательными степенями свободы. Три призматических примитива обеспечивают поступательные степени свободы. Три вращательных примитивов обеспечивают вращательные степени свободы.
Объединенные степени свободы
Блок соединений представляет движение между основой и последующими системами координат как последовательность изменяющихся во времени преобразований. Каждый примитив соединения применяет одно преобразование в этой последовательности. Преобразование перемещает или вращает последующую систему координат относительно базовой системы координат примитива соединения. Для всех, кроме первого примитива соединения, базовая система координат совпадает с последующей системой координат предыдущего примитива соединения в последовательности.
На каждом временном шаге во время симуляции блок соединений применяет последовательность изменяющихся во времени систем координат в этом порядке:
Перевод:
Вдоль оси X базовой системы координат X Prismatic Primitive (Px).
Вдоль оси Y базовой системы координат Y Prismatic Primitive (Py). Эта система координат совпадает с последующей системой координат X Prismatic Primitive (Px).
Вдоль оси Z базовой системы координат Z Prismatic Primitive (Pz). Эта система координат совпадает с последующей системой координат Y Prismatic Primitive (Py).
Вращение:
О оси X базовой системы координат X Revolute Primitive (Rx). Этот кадр совпадает с последующей системой координат Z Prismatic Primitive (Pz).
О оси Y базовой системы координат Y Revolute Primitive (Ry). Эта система координат совпадает с последующей системой координат X Revolute Primitive (Rx).
О оси Z базовой системы координат Z Revolute Primitive (Rz). Эта система координат совпадает с последующей системой координат Y Revolute Primitive (Ry).
Рисунок показывает последовательность, в которой преобразования соединений происходят в заданный временной шаг симуляции. Получившаяся система координат каждого преобразования служит базовой системе координат для следующего преобразования. Поскольку 3-D вращение происходит как последовательность, возможно выравнивание двух осей, что приводит к потере одной вращательной степени свободы. Это явление известно как карданный замок.
Последовательность преобразования соединений
![]()
Набор необязательных целей состояния направляющей сборки для каждого примитива соединения. Цели включают положение и скорость. Уровень приоритета устанавливает относительную важность целевых состояний. Если две цели несовместимы, уровень приоритета определяет, какая из целей должна быть удовлетворена.
Параметры внутренней механики учитывают накопление и рассеивание энергии при каждом примитиве соединения. Пружины действуют как элементы накопления энергии, сопротивляясь любой попытке сместить примитив соединения с его положения равновесия. Демпферы соединений действуют как элементы рассеивания энергии. Пружины и демпферы строго линейные.
Во всех, кроме свинцового винта и примитивов постоянной скорости, пределы соединений служат для ограничения области значений движения между системами координат. Примитив соединения может иметь нижнюю границу, верхнюю границу, или, в состоянии по умолчанию, ни ту, ни другую. Чтобы применить ограничения, соединение добавляет к каждому пружину-демпфер. Чем жестче пружина, тем жестче упор, или прыгнуть, если возникают колебания. Чем сильнее демпфер, тем глубже вязкие потери, которые постепенно уменьшают контактные колебания или, в перегруженных примитивах, препятствуют их образованию вообще.
Каждый примитив соединения имеет набор необязательных портов приведения в действие и измерения. Порты приведения в действие принимают входы физического сигнала, которые управляют примитивами соединения. Эти входы могут быть силами и крутящими моментами или желаемой траекторией соединения. Чувствительные порты обеспечивают выходы физического сигнала, которые измеряют примитивное движение соединения, а также силы приводов и крутящие моменты. Режимы приведения в действие и типы измерения варьируются с помощью примитива соединения.
Задайте призматические цели примитивного состояния и их уровни приоритета. Цель состояния является желаемым значением для одного из параметров состояния соединения - положения и скорости. Приоритетным уровнем является относительная важность целевого состояния. Он определяет, как именно должна быть достигнута цель. Используйте инструмент «Отчет модели» в Mechanics Explorer, чтобы проверить состояние сборки для каждого целевого состояния соединения.
Выберите эту опцию, чтобы задать требуемое положение примитива соединения в начальный момент времени. Это относительное положение, измеренное вдоль оси примитива соединения, начала последующей системы координат относительно источника базовой системы координат. Заданный целевой объект разрешается в базовой системе координат. Выбор этой опции открывает поля приоритета и значения.
Выберите эту опцию, чтобы задать необходимую примитивную скорость соединения в начальном моменте времени. Это относительная скорость, измеренная вдоль оси примитива соединения, начала последующей системы координат относительно источника базовой системы координат. Это разрешено в базовую систему координат. Выбор этой опции открывает поля приоритета и значения.
Выберите целевой приоритет состояния. Это уровень важности, присвоенный целевому объекту состояния. Если все цели состояния не могут быть одновременно удовлетворены, уровень приоритета определяет, какие цели должны удовлетворяться первыми и как тесно их удовлетворять. Эта опция применяется как к целям положения, так и к целям состояния скорости.
| Уровень приоритета | Описание |
|---|---|
High (desired) | Точно удовлетворите целевое состояние |
Low (approximate) | Удовлетворите целевому элементу состояния приблизительно |
Примечание
Во время сборки высокоприоритетные цели ведут себя как точные руководства. Низкоприоритетные цели ведут себя как грубые руководства.
Введите целевое числовое значение состояния. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является m для положения и m/s для скорости.
Задайте призматическую примитивную внутреннюю механику. Внутренние механики включают линейные упругих сил, учет накопления энергии и демпфирующие силы, учитывающие рассеивание энергии. Можно игнорировать внутреннюю механику, сохраняя жесткость пружины и значения коэффициента демпфирования в 0.
Войдите в положение пружинного равновесия. Это расстояние между основой и последующими системами координат, на котором упругая сила равна нулю. Значение по умолчанию 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является m.
Введите линейный коэффициент упругости. Это - сила, необходимая для переноса примитива соединения на модуль расстояние. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является N/m.
Введите линейный коэффициент демпфирования. Это - сила, необходимая для поддержания постоянной примитивной скорости соединения между основой и последующими системами координат. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является N/(m/s).
Ограничьте область значений движений примитива соединения. Пределы соединений используют пружины-демпферы, чтобы противостоять прохождению мимо границ области значений. Примитив соединения может иметь нижнюю границу, верхнюю границу, или, в состоянии по умолчанию, ни ту, ни другую. Чем жестче пружина, тем жестче упор, или прыгнуть, если возникают колебания. Чем сильнее демпфер, тем больше вязкие потери, которые постепенно уменьшают контактные колебания или, в перегруженных примитивах, препятствуют их образованию вообще.
Выберите, чтобы добавить нижнюю границу к области значений движения примитива соединения.
Выберите, чтобы добавить верхнюю границу к области значений движения примитива соединения.
Расположение, мимо которого противостоять совместному путешествию. Местоположение является смещением от основы к последующей, как измерено в базовой системе координат, при котором начинается контакт. Это расстояние вдоль оси в призматических примитивах, угол вокруг оси в вращательных примитивах и угол между двумя осями в сферических примитивах.
Сопротивление контактной пружины перемещению за пределы соединения. Пружина линейная, и ее жесткость постоянна. Чем больше значение, тем сложнее упор. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Сопротивление контактного демпфера движению за предел соединения. Демпфер линейен, и его коэффициент постоянен. Чем больше значение, тем больше вязкие потери, которые постепенно уменьшают контактные колебания, если таковые возникают. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Область, над которой можно поднять усилие пружины-демпфера до его полного значения. Область является расстоянием вдоль оси в призматических примитивах, углом вокруг оси в вращательных примитивах и углом между двумя осями в сферических примитивах.
Чем меньше область, тем резче начало контакта и тем меньше временной шаг, требуемый от решателя. В компромиссе между точностью симуляции и скоростью симуляции уменьшение переходной области улучшает точность, расширяя ее, улучшает скорость.
Задайте опции приведения в действие для призматического примитива соединения. Режимы приведения в действие включают Force и Motion. Выбор Provided by Input из выпадающего списка для режима приведения в действие добавляет к блоку соответствующий порт физического сигнала. Используйте этот порт, чтобы задать входной сигнал. Сигналы срабатывания разрешаются в базовой системе координат.
Выберите настройку силы приводов. Настройкой по умолчанию является None.
| Сила приводов | Описание |
|---|---|
None | Никаких сил приводов. |
Provided by Input | Сила приводов от входа физического сигнала. Сигнал обеспечивает силу, действующую на последующую систему координат относительно базовой системы координат вдоль оси примитива соединения. Равная и противоположная сила действует на базовую систему координат. |
Automatically computed | Сила приводов от автоматического вычисления. Simscape™ Multibody™ вычисляет и применяет силу приводов на основе динамики модели. |
Выберите настройку привода. Настройкой по умолчанию является Automatically Computed.
| Установка приводного движения | Описание |
|---|---|
Provided by Input | Примитивное движение соединения от входа физического сигнала. Сигнал обеспечивает необходимую траекторию последующей системы координат относительно базовой системы координат вдоль оси примитива соединения. |
Automatically computed | Примитивное движение соединения от автоматического вычисления. Simscape Multibody вычисляет и применяет примитивное движение соединения на основе динамики модели. |
Выберите переменные для измерения в призматическом примитиве соединения. Выбор переменной открывает порт физического сигнала, который выводит измеренную величину как функцию времени. Каждая величина измеряется для последующей системы координат относительно базовой системы координат. Это разрешено в базовую систему координат. Можно использовать сигналы измерения для анализа или как вход в системе управления.
Выберите эту опцию, чтобы определить относительное положение начала последующей системы координат относительно источника базовой системы координат вдоль оси примитива соединения.
Выберите эту опцию, чтобы определить относительную скорость начала последующей системы координат относительно источника базовой системы координат вдоль оси примитива соединения.
Выберите эту опцию, чтобы определить относительное ускорение начала последующей системы координат относительно источника базовой системы координат вдоль оси примитива соединения.
Выберите эту опцию, чтобы определить силу приводов, действующую на последующую систему координат, относительна базовая система координат вдоль оси примитива соединения.
Задайте вращательный примитив состояния цели и их уровни приоритета. Цель состояния является желаемым значением для одного из параметров состояния соединения - положения и скорости. Приоритетным уровнем является относительная важность целевого состояния. Он определяет, как именно должна быть достигнута цель. Используйте инструмент «Отчет модели» в Mechanics Explorer, чтобы проверить состояние сборки для каждого целевого состояния соединения.
Выберите эту опцию, чтобы задать требуемое положение примитива соединения в начальный момент времени. Это относительный угол поворота, измеренный вокруг оси примитива соединения, последующей системы координат относительно базовой системы координат. Заданный целевой объект разрешается в базовой системе координат. Выбор этой опции открывает поля приоритета и значения.
Выберите эту опцию, чтобы задать необходимую примитивную скорость соединения в начальном моменте времени. Это относительная скорость вращения, измеренная вокруг оси примитива соединения, последующей системы координат относительно базовой системы координат. Это разрешено в базовую систему координат. Выбор этой опции открывает поля приоритета и значения.
Выберите целевой приоритет состояния. Это уровень важности, присвоенный целевому объекту состояния. Если все цели состояния не могут быть одновременно удовлетворены, уровень приоритета определяет, какие цели должны удовлетворяться первыми и как тесно их удовлетворять. Эта опция применяется как к целям положения, так и к целям состояния скорости.
| Уровень приоритета | Описание |
|---|---|
High (desired) | Точно удовлетворите целевое состояние |
Low (approximate) | Удовлетворите целевому элементу состояния приблизительно |
Примечание
Во время сборки высокоприоритетные цели ведут себя как точные руководства. Низкоприоритетные цели ведут себя как грубые руководства.
Введите целевое числовое значение состояния. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является deg для положения и deg/s для скорости.
Задайте вращательный примитив внутреннюю механику. Внутренние механики включают линейные пружинные крутящие моменты, учет накопления энергии и линейные демпфирующие крутящие моменты, учитывающие рассеивание энергии. Можно игнорировать внутреннюю механику, сохраняя жесткость пружины и значения коэффициента демпфирования в 0.
Войдите в положение пружинного равновесия. Это угол поворота между основой и последующими системами координат, при котором крутящий момент пружины равен нулю. Значение по умолчанию 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является deg.
Введите линейный коэффициент упругости. Это крутящий момент, требуемый для поворота примитива соединения на модуль угол. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является N*m/deg.
Введите линейный коэффициент демпфирования. Это крутящий момент, требуемый для поддержания постоянной примитивной скорости вращения соединения между основой и последующими системами координат. Значение по умолчанию является 0. Выберите или введите физическую единицу измерения. Значение по умолчанию является N*m/(deg/s).
Ограничьте область значений движений примитива соединения. Пределы соединений используют пружины-демпферы, чтобы противостоять прохождению мимо границ области значений. Примитив соединения может иметь нижнюю границу, верхнюю границу, или, в состоянии по умолчанию, ни ту, ни другую. Чем жестче пружина, тем жестче упор, или прыгнуть, если возникают колебания. Чем сильнее демпфер, тем больше вязкие потери, которые постепенно уменьшают контактные колебания или, в перегруженных примитивах, препятствуют их образованию вообще.
Выберите, чтобы добавить нижнюю границу к области значений движения примитива соединения.
Выберите, чтобы добавить верхнюю границу к области значений движения примитива соединения.
Расположение, мимо которого противостоять совместному путешествию. Местоположение является смещением от основы к последующей, как измерено в базовой системе координат, при котором начинается контакт. Это расстояние вдоль оси в призматических примитивах, угол вокруг оси в вращательных примитивах и угол между двумя осями в сферических примитивах.
Сопротивление контактной пружины перемещению за пределы соединения. Пружина линейная, и ее жесткость постоянна. Чем больше значение, тем сложнее упор. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Сопротивление контактного демпфера движению за предел соединения. Демпфер линейен, и его коэффициент постоянен. Чем больше значение, тем больше вязкие потери, которые постепенно уменьшают контактные колебания, если таковые возникают. Пропорция сил пружины к демпферу определяет, является ли упор заниженным и подверженным колебаниям при контакте.
Область, над которой можно поднять усилие пружины-демпфера до его полного значения. Область является расстоянием вдоль оси в призматических примитивах, углом вокруг оси в вращательных примитивах и углом между двумя осями в сферических примитивах.
Чем меньше область, тем резче начало контакта и тем меньше временной шаг, требуемый от решателя. В компромиссе между точностью симуляции и скоростью симуляции уменьшение переходной области улучшает точность, расширяя ее, улучшает скорость.
Задайте опции приведения в действие для примитива шарнира вращения. Режимы приведения в действие включают Torque и Motion. Выбор Provided by Input из выпадающего списка для режима приведения в действие добавляет к блоку соответствующий порт физического сигнала. Используйте этот порт, чтобы задать входной сигнал. Входные сигналы разрешаются в базовую систему координат.
Выберите крутящий момент приведения в действие. Настройкой по умолчанию является None.
| Установка крутящего момента приведения в действие | Описание |
|---|---|
None | Нет приводного крутящего момента. |
Provided by Input | Крутящий момент срабатывания от входа физического сигнала. Сигнал обеспечивает крутящий момент, действующий на последующую систему координат относительно базовой системы координат вокруг оси примитива соединения. На базовая система координат действует равный и противоположный крутящий момент. |
Automatically computed | Крутящий момент срабатывания от автоматического вычисления. Simscape Multibody вычисляет и применяет крутящий момент приведения в действие на основе динамики модели. |
Выберите настройку привода. Настройкой по умолчанию является Automatically Computed.
| Установка приводного движения | Описание |
|---|---|
Provided by Input | Примитивное движение соединения от входа физического сигнала. Сигнал обеспечивает необходимую траекторию последующей системы координат относительно базовой системы координат вдоль оси примитива соединения. |
Automatically computed | Примитивное движение соединения от автоматического вычисления. Simscape Multibody вычисляет и применяет примитивное движение соединения на основе динамики модели. |
Выберите переменные для восприятия в примитиве revolute joint. Выбор переменной открывает порт физического сигнала, который выводит измеренную величину как функцию времени. Каждая величина измеряется для последующей системы координат относительно базовой системы координат. Это разрешено в базовую систему координат. Можно использовать сигналы измерения для анализа или как вход в системе управления.
Выберите эту опцию, чтобы определить относительный угол поворота последующей системы координат относительно базовую систему координат вокруг оси примитива соединения.
Выберите эту опцию, чтобы определить относительную скорость вращения последующей системы координат относительна базовая система координат вокруг оси примитива соединения.
Выберите эту опцию, чтобы определить относительное угловое ускорение последующей системы координат относительна базовая система координат вокруг оси примитива соединения.
Выберите эту опцию, чтобы измерить крутящий момент приведения в действие, действующий на последующую систему координат, относительна базовая система координат вокруг оси примитива соединения.
Задайте режим соединения. Режим соединения может быть нормальным или отключенным на протяжении всей симуляции, или вы можете предоставить входной сигнал, чтобы изменить режим во время симуляции.
Выберите одну из следующих опций, чтобы задать режим соединения. Настройкой по умолчанию является Normal.
| Метод | Описание |
|---|---|
Normal | Соединение ведет себя нормально на протяжении всей симуляции. |
Disengaged | Соединение разъединяется в течение всей симуляции. |
Provided by Input | Эта опция открывает порт mode, который можно подключить к входному сигналу, чтобы изменить режим соединения во время симуляции. Режим соединения нормален, когда входной сигнал 0 и отключается, когда входной сигнал -1. Режим соединения может быть изменен много раз во время симуляции. |
Выберите составные силы и крутящие моменты. Их измерения охватывают все примитивы соединений и характерны для них. Они бывают двух видов: ограничительные и суммарные.
Ограничительные измерения дают сопротивление движению на заблокированных осях соединения. В призматических соединениях, например, которые запрещают перемещение на плоскости xy, это сопротивление уравновешивает все возмущения в направлениях x и y. Суммарные измерения дают сумму по всем силам и крутящим моментам из-за входов приведения в действие, внутренних пружин и демпферов, пределов положения соединений и кинематических ограничений, ограничивающих степени свободы соединения.
Вектор, для определения из пары действие-реакция между основой и последующими системами координат. Пара возникает из третьего закона движения Ньютона, который для блока соединений требует, чтобы сила или крутящий момент на последующей системе координат сопровождали равную и противоположную силу или крутящий момент на базовой системе координат. Укажите, следует ли понимать, что это происходит от базовой системы координат на последующей системе координат или от последующей системы координат на базовой системе координат.
Система координат, на котором можно разрешить векторные компоненты измерения. Системы координат с различными ориентациями дают различные векторные компоненты для одного и того же измерения. Укажите, нужно ли получать эти компоненты из осей базовой системы координат или из осей последующей системы координат. Выбор имеет значение только в соединениях со степенями свободы вращения.
Динамическая переменная для измерения. Ограничительные силы противодействуют перемещению на заблокированных осях соединения, позволяя ему на свободных осях его примитивов. Выберите для вывода вектора ограничительной силы через порт fc.
Динамическая переменная для измерения. Ограничительные крутящие моменты отражают вращение на заблокированных осях соединения, позволяя ему на свободных осях его примитивов. Выберите для вывода вектора крутящего момента через порт tc.
Динамическая переменная для измерения. Общая сила является суммой между всеми примитивами соединений по всем источникам - входы приведения в действие, внутренние пружины и демпферы, пределы положения соединений и кинематические ограничения. Выберите для вывода вектора общей силы через порт ft.
Динамическая переменная для измерения. Полный крутящий момент является суммой между всеми примитивами соединений по всем источникам - входы приведения в действие, внутренние пружины и демпферы, пределы положения соединений и кинематические ограничения. Выберите для вывода вектора общего крутящего момента через порт tt.
Этот блок имеет два порта системы координат. Он также имеет дополнительные порты физического сигнала для определения входов приведения в действие и измерения динамических переменных, таких как силы, крутящие моменты и движение. Вы открываете дополнительный порт, установив флажок sensing, соответствующий этому порту.
B - Базовая система координат
F - Последующая система координат
Примитивы призматического соединения обеспечивают следующие порты приведения в действие:
fx, fy, fz - Силы приводов, действующие на призматические примитивы X, Y и Z
px, py, pz - Желаемые траектории призматических примитивов X, Y, Z
Примитивы шарнира обеспечивают следующие порты срабатывания:
tx, ty, tz - Приводные крутящие моменты, действующие на примитивы вращения X, Y и Z
qx, qy, qz - желаемые повороты примитивов вращения X, Y и Z
Призматические примитивы соединения обеспечивают следующие чувствительные порты:
px, py, pz - положения призматических примитивов X, Y и Z
vx, vy, vz - скорости призматических примитивов X, Y и Z
ax, ay, az - Ускорения призматических примитивов X, Y и Z
fx, fy, fz - Силы приводов, действующие на призматические примитивы X, Y и Z
fllx, flly, fllz - Силы из-за контакта с нижними пределами призматических примитивов X, Y и Z
fulx, full, fulz - Силы из-за контакта с верхними пределами призматических примитивов X, Y и Z
Примитивы шарнира обеспечивают следующие порты измерения:
qx, qy, qz - угловые положения примитивов вращения X, Y и Z
wx, wy, wz - скорости вращения примитивов вращения X, Y и Z
bx, bz - Угловое ускорение примитивов вращения X, Y и Z
tx, ty, tz - Приводные крутящие моменты, действующие на примитивы вращения X, Y и Z
tllx, tlly, tllz - Крутящие моменты из-за контакта с нижними пределами примитивов вращения X, Y и Z
tulx, tuly, tulz - Крутящие моменты из-за контакта с верхними пределами примитивов вращения X, Y и Z
Следующие измерительные порты обеспечивают композитные силы и крутящие моменты, действующие на соединение:
fc - Ограничительная сила
tc - Ограничительный крутящий момент
ft - Общая сила
tt - Полный крутящий момент
Строение режима обеспечивает следующий порт:
mode - Значение режима соединения. Если вход равен 0, соединение ведет себя нормально. Если вход равен -1соединение ведет себя как отключенное.
6-DOF Joint | Gimbal Joint | Prismatic Joint | Revolute Joint
