variable inertia является формообразующим элементом, масса которого, центр масс или тензор инерции могут изменяться во времени. Переменные инерции включают защелкнутое содержимое ведра обратного пути, движущихся пассажиров манлифта стрелы и поршневую нагрузку жидкости замедляющегося баки. Инерция переменной моделируется с помощью блока General Variable Mass из библиотеки Body Elements > Variable Mass. Этот блок принимает различные инерционные свойства как константы или переменные. Порты физического сигнала обеспечивают средство для определения свойств переменной.
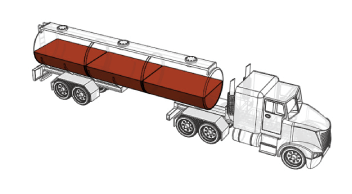
Нагрузка на жидкость как переменная инерция
Можно задать входные входы переменной с помощью Simscape™ или Simulink® блоки. Вы должны преобразовать любые сигналы Simulink в физические сигналы с помощью блока Simulink-PS Converter. Избегайте внезапных изменений, так как они могут увеличить жесткость модели и замедлить симуляцию. Убедитесь, что размерности сигнала согласуются с портами:
Скаляр для массы (порт m)
Трехэлементный вектор для центра масс (порт com)
Девятиэлементная матрица для тензора инерции (порт I)
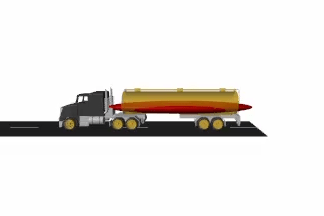
Инерция переменных, сопоставленная с блоками General Variable Mass, не имеет геометрии. Вы должны визуализировать эти инерции как графические маркеры или как эквивалентные эллипсоиды инерции. Эллипсоидные размерности и центр геометрии варьируются в зависимости от массы, центра масс и тензора инерции, давая эллипсоидам более информативную визуализацию модели. Маркеры инерции показаны на обновлении модели и во время симуляции. Эллипсоиды переменной инерции показаны только во время симуляции. Рисунок показывает визуализацию инерции, представляющую жидкую нагрузку, переносимую баком грузовиком.
Эквивалентная инерция эллипсоидной визуализации
Блок General Variable Mass захватывает только инерционные эффекты. Любые взаимодействия между инерцией переменных и другими компонентами модели должны быть моделированы явно. Примеры взаимодействий включают силы контакта между нагрузкой жидкости бака и окружающей оболочкой. Они включают также изменение импульса, получаемое путем вытеснения продуктов сгорания двигательной установки - например, в морском или космическом транспортном средстве. Используйте другие Multibody™ Simscape, Simscape и Блоки Simulink, чтобы захватить такие взаимодействия.
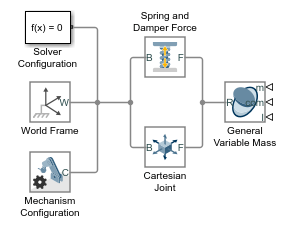
Создайте простую модель системы масса-пружина для моделирования в условиях постоянной массы и переменной массы. Модель использует блок General Variable Mass, чтобы представлять контейнер, на который постепенно сбрасывается груз песка. Блок Cartesian Joint предоставляет телу с переменной массой три поступательные степени свободы, хотя только одна - вдоль вертикальной z -ось - актуальна во время симуляции. Блок Spring and Damper Force представляет пружинный элемент, который соединяет тело переменной массы с Лабораторной системой координат.

В MATLAB® в командной строке введите smnew. Команда открывает шаблон модели с обычно используемыми блоками Simscape Multibody.
Добавьте следующие блоки к полотну модели:
General Variable Mass (Body Elements> Variable Mass)
Cartesian Joint (<reservedrangesplaceholder0>)
Spring and Damper Force (<reservedrangesplaceholder0>)
Соедините блоки как показано на рисунке и удалите оставшиеся блоки. Убедитесь, что ориентация блока соединений соответствует показанному на рисунке, при этом порт базовой системы координат обращен к блоку World Frame.
В Spring and Damper Force диалогового окна блока установите параметр Natural Length равным 0.2 m и параметр Spring Stiffness для 10 Н/м.
В Cartesian Joint диалоговом окне блока расширьте Z Prismatic Primitive (Pz) область, выберите опцию <reservedrangesplaceholder3>> <reservedrangesplaceholder2> и установите Value параметр на 0.1 м.
В диалоговом окне Cartesian Joint блока разверните область Z Prismatic Primitive (Pz) и установите флажок Sensing > Position. Блок открывает выходной порт физического сигнала с положением системы координат генератора.
Добавьте следующие блоки к полотну модели:
PS-Simulink Converter (Simscape> Foundation Library> Utilities)
Scope (Simulink> Sinks)
Соедините блоки как показано на рисунке.
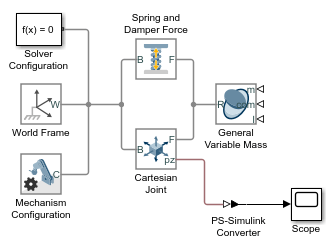
В General Variable Mass диалогового окна блока установите параметр Type равным Custom. Эта опция позволяет вам смоделировать переменное распределение масс с инерцией вращения.
Установите параметры Mass, Center of Mass и Inertia Matrix равными Constant и параметр Mass > Value, чтобы 0.2 кг.
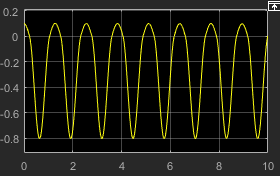
Запустите симуляцию и откройте блок Scope. На график показано положение опорной системы координат переменной массы. Обратите внимание, что частота и амплитуда колебаний остаются постоянными в течение всей симуляции.
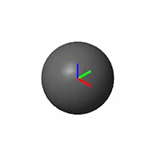
В Mechanics Explorer откроется 3-D анимация модели. Визуализация содержит только эллипсоид инерции - здесь сфера из-за симметрии тензора инерции по умолчанию, используемого в модели. В панели меню выберите View > Show Frames, чтобы показать все системы координат в модели. Обратите внимание, что эллипсоидные размерности остаются постоянными во время симуляции, отражая постоянные инерционные свойства, заданные в модели.
В диалоговом окне General Variable Mass блока установите параметры Center of Mass и Inertia Matrix равными Constant. Порты физического сигнала, используемые для изменения их значений во время симуляции, становятся скрытыми, оставляя только твердую массу как переменную.
Добавьте эти блоки к холсту модели:
Simulink-PS Converter (Simscape> Foundation Library> Utilities)
Ramp (Simulink> Sources)
Соедините блоки как показано на рисунке.
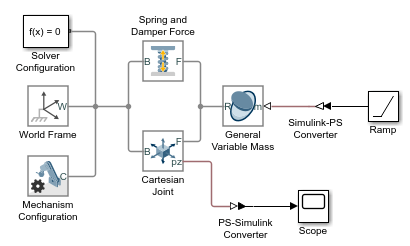
В Ramp диалогового окна блока установите параметр Slope равным 0.1 и параметр Initial output для 0.2. Сигнал Ramp передается в блок General Variable Mass в единицах массы Simscape по умолчанию, кг. Сигнал соответствует постоянно увеличивающейся массе, которая начинается с 0.2 кг и заканчивается на 1.2 кг после 10-секундной симуляции.
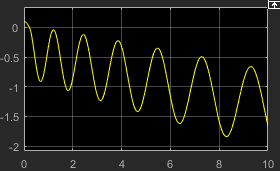
Запустите симуляцию и откройте блок Scope. График положения показывает переменную частоту колебаний и амплитуду. Увеличение массы приводит к увеличению частоты колебаний и уменьшению амплитуды.
Mechanics Explorer обновляет результаты визуализации. Обратите внимание, что эллипсоидные размерности уменьшаются по мере продвижения симуляции, отражая их обратную пропорциональность переменной массе.