Формирование цикла со смешанной чувствительностью позволяет вам проектировать H ∞ контроллер, одновременно формируя частотные характеристики для отслеживания и отторжения возмущения, снижения шума и робастности и усилия контроллера. Этот метод является полезным способом сбалансировать необходимый компромисс между эффективностью и робастностью. Чтобы использовать этот метод, вы преобразовываете свои желаемые отклики в до трех функций взвешивания, которые mixsyn команда используется для синтеза контроллера.
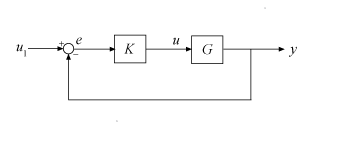
mixsyn проектирует K контроллера для вашего объекта G, принимая стандартное строение управления следующей схемы.
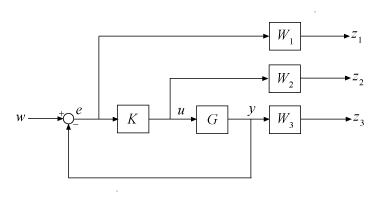
Для этого функция добавляет предоставляемые вами функции взвешивания, W 1 (s), W 2 (s) и W 3 (s), к системе управления, как показано на следующей схеме.
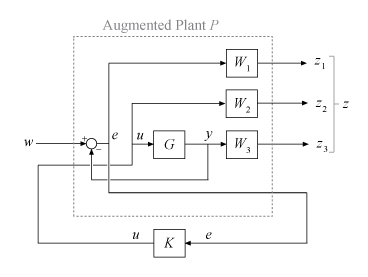
mixsyn рассматривает задачу как задачу H ∞ синтеза ( см.hinfsyn). Он анализирует взвешенную систему управления как LFT (P, K), где P является дополненным объектом P таким что {z; e} = P {w; u}, как показано на следующей схеме.
Передаточная функция от w до z может быть выражена как
где
S = (I + GK)–1 - функция чувствительности.
KS - передаточная функция от w до u (усилие управления).
T = (I – S) = GK (I + GK)–1 - дополнительная функция чувствительности.
mixsyn ищет контроллер K, который минимизирует || M (<reservedrangesplaceholder2>) || ∞, норма <reservedrangesplaceholder1> (пиковая выгода) M. Для этого он вызываетhinfsyn на дополненном объекте P = augw(G,W1,W2,W3).
Для цикла L усиления = GK, чтобы достичь хороших отслеживания и подавления помех уставки, вы обычно хотите высокий коэффициент усиления цикла на низкой частоте. Чтобы достичь робастности и ослабления шума измерения, вы обычно хотите, чтобы L откатились на высокой частоте. Эта форма цикла эквивалентна малой S на низкой частоте и малой T на высокой частоте.
Для формирования цикла со смешанной чувствительностью вы выбираете функции взвешивания, чтобы задать эти целевые формы для S и T, а также KS усилий управления. Ограничение H ∞ проекта,
означает, что
Поэтому вы устанавливаете веса равными взаимности требуемых форм для S, KS и T. В частности,
Для хорошего отслеживания уставки и подавления помех эффективности выберите W 1 большие внутри полосы пропускания управления, чтобы получить маленькие S .
Для ослабления робастности и шума выберите W 3 большие вне полосы пропускания управления, чтобы получить маленькие T .
Чтобы ограничить усилие управления в конкретном диапазоне частот, увеличьте амплитуду W 2 в этом диапазоне частот, чтобы получить малую KS.
mixsyn возвращает минимальный ||<reservedrangesplaceholder2> (s), ||∞ в выходном аргументе gamma. Для возвращенного K контроллера, затем,
Если вы не хотите ограничивать усилия по управлению, можно опустить W 2. В этом случае ,mixsyn минимизирует H ∞ норму
Вы можете использовать makeweight создание весовых функций с желаемыми профилями усиления. Следующий пример иллюстрирует, как выбрать и создать функции взвешивания для проектирования контроллера с mixsyn.
Не выбирайте функции взвешивания с полюсами, очень близкими к s = 0 (z = 1 для систем дискретного времени). Для образца, хотя может показаться разумным выбрать W 1 = 1/ s, чтобы применить нуль установившуюся ошибку, это вводит нестабильный полюс, который не может быть стабилизирован, вызывая неудачу синтеза. Вместо этого выберите W 1 = 1/( s + δ). Значение δ должно быть маленьким, но не очень маленьким по сравнению с динамикой системы. Например, для наилучших числовых результатов, если ваша целевая частота среза составляет около 1 рад/с, выберите δ = 0,0001 или 0,001. Точно так же, за дискретное время, выберите шаги расчета, такие что система и динамика взвешивания не более чем на десять или две десятилетия ниже частоты Найквиста.
Загрузите модель объекта управления для смешанной чувствительности проектирование контроллера. Эта модель с двумя входами, двумя выходами, шестью состояниями описана в примере Цикл контроллера оси тангажа HIMAT.
load mixsynExampleData G size(G)
State-space model with 2 outputs, 2 inputs, and 6 states.
Чтобы спроектировать контроллер для эффективности и робастности, сформируйте чувствительность и дополнительные функции чувствительности. Выберите веса, которые являются обратными требуемым формам.
Чтобы достичь хорошей эффективности отслеживания уставки и подавления помех, сформируйте S, чтобы быть маленьким внутри полосы пропускания управления, что означает выбор W1 большой на низкой частоте, качающийся на высокой частоте. В данном примере задайте W1 с:
Низкочастотный коэффициент усиления около 30 дБ (33 в абсолютных модулях)
Высокочастотный коэффициент усиления около -6 дБ (0,5 в абсолютных модулях)
Кроссовер на 0 дБ со скоростью около 5 рад/с.
W1 = makeweight(33,5,0.5);
Для ослабления робастности и шума, формы T быть маленьким вне полосы пропускания управления, что означает выбор W3 большой на высокой частоте.
W3 = makeweight(0.5,20,20);
Исследуйте обе функции взвешивания. Их обратные функции являются целевыми формами для S и T.
bodemag(W1,W3) yline(0,'--'); legend('W1','W3','0 dB') grid on

Потому что S + T = I, mixsyn невозможно сделать оба S и T малый (менее 0 дБ) в той же частотной области значений. Поэтому, когда вы задаете веса, должен быть полоса частот, в котором оба W1 и W3 менее 0 дБ.
Использование mixsyn вычислить оптимальный контроллер смешанной чувствительности с этими весами. В данном примере не налагайте штрафа на усилие контроллера, задавая W2 на [].
[K,CL,gamma] = mixsyn(G,W1,[],W3); gamma
gamma = 0.7331
Результат gamma, которое является пиковым сингулярным значением на всех частотах, значительно ниже 1, что указывает на то, что система с обратной связью соответствует проектным требованиям. Исследуйте полученные отклики системы. Во-первых, сравните полученную чувствительность S и дополнительная чувствительность T к соответствующим взвешивающим функциям W1 и W3.
L = G*K; I = eye(size(L)); S = feedback(I,L); T= I-S; sigma(S,'b',W1,'b--',T,'r',W3,'r--',{0.1,1000}) legend('S','W1','T','W3')

График показывает, что S и T достигнуть желаемой формы цикла, где S является большой внутри полосы пропускания управления, а является маленькой вне полосы пропускания управления.
Чтобы увидеть, как формирование цикла смешанной чувствительности достигает целей формирования классического цикла, сравните реакцию разомкнутого контура L в функции взвешивания. L ~ W1 где W1 является большим, и L ~ 1/W3 где W3 является большим.
sigma(L,'b',W1,'r--',1/W3,'g--',{0.1,1000}) legend('L','W1','1/W3')

