Вычислите оптимальный контроллер H-бесконечности
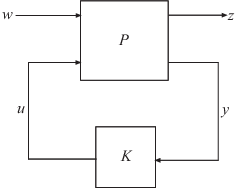
[ вычисляет стабилизирующий H ∞ -оптимальный K,CL,gamma] = hinfsyn(P,nmeas,ncont)контроллер K для объекта P. Объект имеет секционированную форму
где:
w представляет входы нарушения порядка.
u представляет входы управления.
z представляет выходы ошибки, которые будут сохраняться маленькими.
y представляет выходы измерения, предоставляемые контроллеру.
nmeas и ncont количество сигналов в y и u, соответственно. y и u являются последними выходами и входами P, соответственно. hinfsyn возвращает K контроллера который стабилизирует P и имеет такое же количество состояний. Система с обратной связью CL = lft(P,K) достигает уровня эффективности gamma, которая является H ∞ нормой CL (см. hinfnorm).
[ вычисляет контроллер для целевого уровня эффективности K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry)gamTry. Определение gamTry может быть полезным, когда оптимальная эффективность контроллера лучше, чем вам нужно для вашего приложения. В этом случае менее оптимальный контроллер может иметь меньшие усиления и быть более численно хорошо обусловлен. Если gamTry не достижимо, hinfsyn возвращает [] для K и CL, и Inf для gamma.
[ выполняет поиск по области значений K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamRange)gamRange для достижения наилучшей эффективности. Задайте область значений с вектором формы [gmin,gmax]. Ограничение области значений поиска может ускорить расчет, уменьшив количество итераций, выполненных hinfsyn для тестирования различных уровней эффективности.
[ задает дополнительные опции расчета. Создание K,CL,gamma] = hinfsyn(___,opts)opts, использование hinfsynOptions. Задайте opts после всех других входных параметров.
Синтезируйте контроллер с использованием различных целевых уровней эффективности. Объект в этом примере основан на дополненной модели объекта управления, используемой в робастном контроле активной суспензии. Загрузите объект.
load hinfsynExData P size(P)
State-space model with 5 outputs, 4 inputs, and 9 states.
Этот объект имеет пять выходов и четыре входа, где последние два выхода являются сигналами измерения, чтобы предоставить контроллеру, и последний вход является управляющим сигналом. Вычислите an -оптимальный контроллер.
ncont = 1; nmeas = 2; [K1,CL,gamma] = hinfsyn(P,nmeas,ncont);
Получившийся контроллер с двумя входами и одним выходом имеет то же количество состояний, что и P.
size(K1)
State-space model with 1 outputs, 2 inputs, and 9 states.
Оптимальный уровень эффективности, достигнутый этим контроллером, возвращается следующим gamma. Это значение является норма системы с обратной связью CL.
gamma
gamma = 0.9405
Можно изучить график сингулярного значения системы с обратной связью, чтобы подтвердить, что ее самое большое сингулярное значение не превышает gamma.
sigma(CL,ss(gamma)) ylim([-120,20]);

Для контроллеров, которые близки к оптимальной эффективности, усиления контроллера иногда могут стать большими. Если вы знаете, что ваше приложение не требует оптимального достижимого уровня эффективности, можно ограничить область значений значения, которые hinfsyn тесты. Предположим, вы знаете, что достаточно хорошо для вашего приложения. Используя тот же объект, что и в примере H-Infinity Controller Synthesis, вычислите контроллер с помощью целевой эффективности области значений [1,4,1,6]. Включите отображение, чтобы увидеть прогресс расчетов.
load hinfsynExData P ncont = 1; nmeas = 2; opts = hinfsynOptions('Display','on'); gamRange = [1.4 1.6]; [K,CL,gamma,info] = hinfsyn(P,nmeas,ncont,gamRange,opts);
Test bounds: 1.4 <= gamma <= 1.6 gamma X>=0 Y>=0 rho(XY)<1 p/f 1.60e+00 4.9e-07 0.0e+00 1.462e-02 p 1.50e+00 5.0e-07 0.0e+00 1.681e-02 p 1.45e+00 5.0e-07 0.0e+00 1.803e-02 p 1.42e+00 5.0e-07 0.0e+00 1.868e-02 p 1.41e+00 5.0e-07 0.0e+00 1.902e-02 p Best performance (actual): 0.946
На отображении показаны все уровни производительности, протестированные hinfsyn. В этом случае все протестированные уровни эффективности проходят тесты, которые hinfsyn применяется для устойчивости в системе с обратной связью (см. Алгоритмы). Несмотря на то, что наименьший протестированный уровень равен 1,41, контроллер, возвращенный для этого значения, достигает фактического уровня эффективности gamma, что составляет около 0,95. Наименьший протестированный уровень возвращается в gamma поле info структура.
info.gamma
ans = 1.4117
Если вы пытаетесь получить уровень производительности, который не достижим ни с одним контроллером, отображение сообщает вам, что цель слишком мала, и возвращает пустой контроллер и систему с обратной связью. Например, предположим, что вы пытаетесь достичь уровня эффективности 0,75.
gamTry = 0.75
gamTry = 0.7500
[K,CL,gamma] = hinfsyn(P,nmeas,ncont,gamTry,opts)
Specified upper limit GMAX=0.75 is too small, needs to be greater than 0.94.
K =
[]
CL =
[]
gamma = Inf
Разработайте контроллер смешанной чувствительности для следующего объекта, дополненный следующими фильтрами формирования контура (см mixsyn).
Определите объект, весовые фильтры и дополненный объект.
s = zpk('s');
G = (s-1)/(s+1);
W1 = 0.1*(s+100)/(100*s+1);
W2 = 0.1;
W3 = [];
P = augw(G,W1,W2,W3);Синтезируйте контроллер.
[K,CL,gamma] = hinfsyn(P,1,1); gamma
gamma = 0.1831
Для этой системы, gamma составляет около 0,18, или около -15 дБ.
Исследуйте сингулярные значения результата с обратной связью.
sigma(CL,ss(gamma))

Вычислите новый контроллер для той же системы без .
W1 = []; P = augw(G,W1,W2,W3); [K,CL,gamma] = hinfsyn(P,1,1);
В этом случае полученный контроллер K равен нулю, и передаточная функция с обратной связью CL = K*(1+G*K) также равен нулю.
K - Контроллерss объект модели | []CL - Передаточная функция с обратной связьюss объект модели | []Передаточная функция с обратной связью, возвращенная как пространство состояний (ss) объект модели или []. Передаточная функция с обратной связью задается CL = lft(P,K) как на следующей схеме.
Возвращенный уровень эффективности gamma - H ∞ норма CL.
Если вы поставляете gamTry или gamRange и заданные уровни эффективности не достижимы, тогда CL = [].
gamma - эффективность контроллераInfЭффективность контроллера, возвращенная как неотрицательное скалярное значение или Inf. Это значение является эффективностью, достигнутым с использованием возвращенного контроллера K, и является H ∞ нормой CL (см. hinfnorm). Если вы не обеспечиваете уровни эффективности для тестирования с использованием gamTry или gamRange, затем gamma является наилучшим достижимым уровнем эффективности.
Если вы предоставляете gamTry или gamRange, затем gamma - фактический уровень производительности, достигнутый контроллером, вычисленным для наилучшего проходного уровня производительности, который hinfsyn пытается. Если указанные уровни эффективности не достижимы, то gamma = Inf.
info - Синтез-данные[]Дополнительные данные синтеза, возвращенные как структура или [] (если заданный уровень эффективности не достижим). Для метода синтеза на основе Риккати по умолчанию, info имеет следующие поля.
| Область | Описание |
|---|---|
gamma | Уровень производительности, используемый для вычисления |
X,Y | Решения Riccati X ∞ и Y ∞ для |
Ku,Kw | Усиления обратной связи о состоянии |
Lx,Lu | Усиления контроллера наблюдателя |
Preg | Регуляризованный объект, используемая для |
AS | Параметризация контроллера всех решений, возвращенная как пространство состояний ( |
Для метода синтеза на основе LMI, info содержит лучшую эффективность gamma и соответствующие решения R и S. (Использование hinfsynOptions для изменения метода синтеза.)
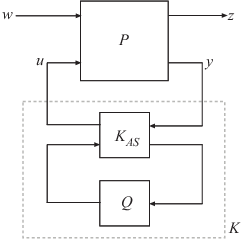
В целом решение задачи оптимального управления нормой по бесконечности неоднородно. Контроллер возвращается по hinfsyn является только одним конкретным решением, K. Для метода, основанного на Риккати по умолчанию, info.AS содержит параметризацию контроллера всего решения K AS. Все решения с обратной связью эффективности γ или менее параметризованы свободной стабильной Q карты сужения, которая ограничена .
Другими словами, решения включают каждый стабилизирующий контроллер K (s), который делает
Вот, - передаточная функция с обратной связью CL. Эти K контроллеров (s) заданы:
Ks = lft(info.AS,Q)
где Q является стабильной системой LTI, удовлетворяющей norm(Q,Inf) < info.gamma.
hinfsyn дает вам усиления обратной связи о состоянии и усиления о наблюдателе, которые можно использовать, чтобы выразить контроллер в форме наблюдателя. Форма наблюдателя контроллера K является:
Здесь we оценка наихудшего нарушения, и термин инновации, e дается:
hinfsyn возвращает функции обратной связи о состоянии Ku и Kw, и наблюдатель получает Lx и Lu как поля в info выходной аргумент.
Вы можете использовать эту форму контроллера для табличного управления в Simulink®. Для этого сведите матрицы объекта управления и матрицы усиления контроллера в таблицу как функцию от переменных планирования с помощью блока Matrix Interpolation (Simulink). Затем используйте форму наблюдателя контроллера, чтобы обновить переменные контроллера, когда изменяются переменные планирования.
По умолчанию, hinfsyn использует две формулы Риккати ([1], [2]) со сдвигом цикла [3]. Вы можете использоватьhinfsynOptions для перехода к основанному на LMI методу ([4], [5], [6]). Можно также задать метод максимальной энтропии. В этом методе ,hinfsyn возвращает контроллер H ∞, который максимизирует энтропийный интеграл, относящийся к точке S0. Для систем в непрерывном времени этот интеграл является:
где - передаточная функция с обратной связью CL. Аналогичный интеграл используется для систем дискретного времени.
Для всех методов функция использует стандартный метод γ -итерации, чтобы определить оптимальное значение γ уровня эффективности. γ - итерация bisection algorithm, который начинается с высоких и низких оценок γ и повторяет на γ значения, чтобы приблизиться к оптимальной системе управления <reservedrangesplaceholder0> .
При каждом значении γ алгоритм проверяет γ значение, чтобы определить, существует ли решение. В находящемся в Riccati методе алгоритм вычисляет самый маленький уровень эффективности, для которого существуют стабилизирующиеся решения Riccati X = <reservedrangesplaceholder6> / γ и Y = <reservedrangesplaceholder3> / γ. Для любого γ, превышающего этот уровень эффективности, и в области значений gamRangeалгоритм оценивает формулы центрального контроллера (K формулы) и проверяет устойчивость системы с обратной связью CL = lft(P,K). Этот шаг эквивалентен проверке условий:
min(eig(X)) ≥ 0
min(eig(Y)) ≥ 0
rho(XY) < 1, где спектральный радиус rho(XY) = max(abs(eig(XY)))
γ, которая удовлетворяет этим условиям, passes. Критерий остановки для алгоритма бисекции требует относительного различия между последним γ значением, которое не прошло, и последним γ значением, которое прошло, меньше 0,01. (Можно изменить этот критерий, используя hinfsynOptions.) hinfsyn возвращает контроллер, соответствующий наименьшему тестируемому γ значению, которое проходит. Для контроллеров в дискретном времени алгоритм выполняет дополнительные расчеты, чтобы создать сквозное соединение матрицу DK.
Используйте Display опция hinfsynOptions сделать hinfsyn отображать значения, показывающие, какие из условий удовлетворяются для каждого γ тестируемого значения.
Алгоритм работает лучше всего, когда объект удовлетворяет следующим условиям:
D 12 и D 21 имеют полный ранг.
имеет полный ранг столбца для всех ω ∊ R.
имеет полный ранг строк для всех ω ∊ R.
Когда эти условия ранга не удерживаются, контроллер может иметь нежелательные свойства. Если <reservedrangesplaceholder3> 12 и <reservedrangesplaceholder2> 21 не полный ранг, то контроллер <reservedrangesplaceholder1> K может иметь большой коэффициент усиления высокой частоты. Если любое из двух последних условий ранга не выдерживает на некоторой частотной ω, контроллер может иметь очень слегка демпфированные полюса около этой частоты.
[1] Гловер, К. и Дж. К. Дойл. «Формулы пространства состояний для всех стабилизирующих контроллеров, которые удовлетворяют H∞ норме привязки и отношению к чувствительности к риску». Systems & Control Letters, Vol. 11, Number 8, 1988, pp. 167-172.
[2] Дойл, Дж. К. Гловер, П. Харгонекар и Б. Фрэнсис. «Государственно-пространственные решения стандартных задач H2 и H∞ управления». Транзакции IEEE по автоматическому управлению, том 34, номер 8, август 1989, стр. 831-847.
[3] Сафонов, М.Г., Д.Ж.Н. Limebeer, and R.Y. Chiang. Упрощение теории H∞ с помощью цикловперемены, матричного карандаша и дескриптора. Int. J. Contr., Vol. 50, Number 6, 1989, pp. 2467-2488.
[4] Packard, A., K. Zhou, P. Pandey, J. Leonhardson, and G. Balas. Оптимальное, постоянное масштабирование подобия ввода-вывода для задач полной информации и обратной связи о состоянии. Системы и управляющие буквы, том 19, номер 4, 1992, стр. 271-280.
[5] Gahinet, P., and P. Apkarian. Подход линейного матричного неравенства к H∞-control. Int. J. Робастное и нелинейное управление, том 4, число. 4, 1994, стр 421–448.
[6] Ивасаки, Т. и Р. Э. Скелтон. «Все контроллеры для общей задачи H∞-control: условий существования LMI и формул пространства состояний». Automatica, Vol. 30, Number 8, 1994, pp. 1307-1317.
