Преобразуйте дисковый запас по амплитуде в размер и наклон диска
umargin и diskmargin моделируют коэффициент усиления и изменение фазы как мультипликативный коэффициент F (s) беря значения в диске с центром на действительной оси. Диск описывается двумя параметрами: ɑ, который устанавливает размер изменения, и σ, или наклон, который смещает изменение усиления к увеличению или уменьшению. (Смотрите Алгоритмы для получения дополнительной информации об этой модели.) В качестве альтернативы диск может быть описан своими реальными точками пересечения по оси DGM = [gmin,gmax], которые представляют относительную величину изменения усиления вокруг номинального значения F = 1. Использовать gm2dm и dm2gm для преобразования между ɑ, значениями σ и дисковым запасом по амплитуде DGM = [gmin,gmax] которые описывают тот же диск.
Вычислите размер диска α диска, который представляет изменение коэффициента усиления ± 6 дБ, то есть коэффициент усиления, который может увеличиться или уменьшиться примерно в 2 раза.
GM = db2mag(6); [alpha,sigma] = gm2dm(GM)
alpha = 0.6646
sigma = 0
Для симметричных изменений усиления, наклон sigma равен 0. Исследуйте диск, соответствующий этому изменению усиления.
diskmarginplot(alpha,sigma,'disk')
Диск, который захватывает изменения коэффициента усиления в двух направлениях, также моделирует изменения фазы ± 37 °.
Определите размер и наклон диска, необходимые для захвата изменений усиления между 80% и 150% номинального и фазового изменения между -20 и + 40 степенями. Во-первых, используйте getDGM для поиска DGM = [gmin,gmax] который описывает диск, который захватывает эти целевые области значений.
DGM = getDGM([0.8,1.5],[-20,40],'tight')DGM = 1×2
0.2031 1.5000
Теперь используйте gm2dm для преобразования дискового изменения коэффициента усиления в параметризацию диска α ,
[alpha,sigma] = gm2dm(DGM)
alpha = 0.6145
sigma = -1.7451
Для смоделированных изменений усиления и фазы наклон меньше нуля, потому что дисковая область значений усиления DGM = [0.2 1.5] включает в себя большее уменьшение усиления, чем увеличение.
diskmarginplot(alpha,sigma,'disk')
Определите размер диска и наклон дисков, которые захватывают области значений коэффициентов усиления [0.2,1.3], [0.5,2] и [0.8,3].
GainRange1 = [0.2,1.3]; GainRange2 = [0.5,2]; GainRange3 = [0.8,3];
Для областей значений усиления выше вычислите дисковый запас по амплитуде.
[alpha,sigma] = gm2dm([GainRange1;GainRange2;GainRange3])
alpha = 3×1
0.4364
0.6667
0.3636
sigma = 3×1
-3.0833
0
3.5000
Для векторной sigmaпервая запись отрицательна, потому что первая запись DGM имеет смещение к уменьшению усиления. Точно так же второй вход равен нулю из-за изменения сбалансированного усиления, а третий вход положителен из-за смещения к увеличению усиления. График показывает диски, соответствующие области значений изменений усиления, указанному выше.
diskmarginplot(alpha,sigma,'disk')
umargin и diskmargin моделируют изменения усиления и фазы в индивидуальном канале обратной связи как частотно-зависимый мультипликативный коэффициент F (s), умножающий номинальную L отклика без разомкнутого контура (s), так что возмущенная характеристика является L (s) F (s). Коэффициент F (s) параметризован:
В этой модели,
δ (s) является динамической неопределенностью с ограничением по усилению, нормированной так, что она всегда изменяется внутри единичного диска (||<reservedrangesplaceholder0>||∞ < 1).
ɑ устанавливает величину усиления и изменения фазы, смоделированные F. Для фиксированных σ параметр ɑ управляет размером диска. Для ɑ = 0 мультипликативный коэффициент равен 1, соответствующий номинальной L.
σ, называемое skew, смещает смоделированную неопределенность в сторону увеличения или уменьшения усиления.
Коэффициент F принимает значения в диске с центром на действительной оси и содержащем номинальное значение F = 1. Диск характеризуется своей точкой пересечения DGM = [gmin,gmax] с действительной осью. gmin < 1 и gmin > 1 - минимальные и максимальные относительные изменения в усилении, моделируемые F, в номинальной фазе. Фаза неопределенность, смоделированная F, является областью значений DPM = [-pm,pm] значений фазы при номинальном усилении (|<reservedrangesplaceholder1>| = 1). Например, на следующем графике правая сторона показывает дисковое F, которое пересекает действительную ось в интервале [0.71.1.4]. Левая сторона показывает, что этот диск моделирует изменение усиления ± 3 дБ и изменение фазы ± 19 °.
DGM = [0.71,1.4]
F = umargin('F',DGM)
plot(F)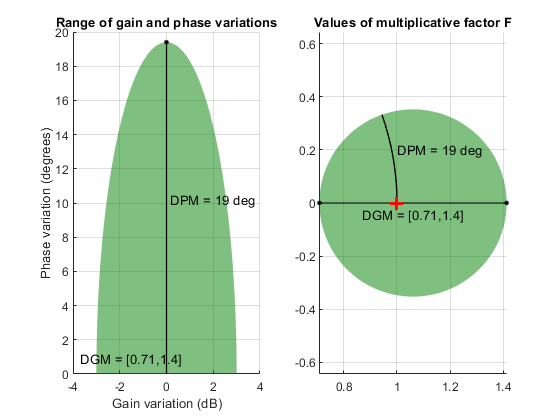
gm2dm и gm2dm преобразует между этими двумя способами определения диска мультипликативного усиления и фазы неопределенности: Область значений изменения усиления формы DGM = [gmin,gmax]и ɑ σ параметризацией соответствующего диска .
Для получения дополнительной информации о модели неопределенности для изменений усиления и фазы, смотрите анализ устойчивости с использованием полей диска.
diskmargin | diskmarginplot | dm2gm | getDGM | umargin
