Модель руководства для фиксированных БПЛА
A fixedwing объект представляет собой модель наведения пониженного порядка для беспилотного летательного транспортного средства (БПЛА). Модель аппроксимирует поведение системы с обратной связью, состоящей из контроллера автопилота и кинематической модели 3-D движения с неподвижным крылом.
Для мультироторных БПЛА см. multirotor.
model = fixedwing создает модель движения фиксированного крыла с double значения точности для входов, выходов и параметров конфигурации модели руководства.
model = fixedwing(DataType) определяет точность типа данных (DataType свойство) для входов, выходов и параметров строений модели руководства.
control | Команды управления для БПЛА |
derivative | Производная по времени от состояний БПЛА |
environment | Входы окружающей среды для БПЛА |
state | Вектор состояния БПЛА |
В этом примере показано, как использовать fixedwing модель руководства для симуляции изменения состояния БПЛА из-за входных команд.
Создайте модель руководства фиксированного направления.
model = fixedwing;
Установите скорость воздуха транспортного средства путем изменения структуры от state функция.
s = state(model);
s(4) = 5; % 5 m/sЗадайте команду управления, u, что поддерживает скорость воздуха и дает угол крена pi/12.
u = control(model); u.RollAngle = pi/12; u.AirSpeed = 5;
Создайте окружение по умолчанию без ветра.
e = environment(model);
Вычислите производную по времени от состояния с учетом текущего состояния, команды управления и окружения.
sdot = derivative(model,s,u,e);
Симулируйте состояние БПЛА с помощью ode45 интегрирование. The y поле выводит состояния БПЛА фиксированного типа на основе этой симуляции.
simOut = ode45(@(~,x)derivative(model,x,u,e), [0 50], s); size(simOut.y)
ans = 1×2
8 904
Постройте график изменения угла крена на основе выходов симуляции. Угол крена является 7-й строкой simOut.y выход.
plot(simOut.y(7,:))

Можно также построить график траектории фиксированного крыла с помощью plotTransforms. Создайте векторы перемещения и поворота из моделируемого состояния. Downsample (каждый 30-й элемент) и транспонируйте simOut элементы и преобразуйте углы Эйлера в кватернионы. Задайте mesh как fixedwing.stl файл и положительное Z-направление как "down". Отображаемый вид показывает БПЛА, совершающий постоянный поворот на основе постоянного угла крена.
downsample = 1:30:size(simOut.y,2); translations = simOut.y(1:3,downsample)'; % xyz-position rotations = eul2quat([simOut.y(5,downsample)',simOut.y(6,downsample)',simOut.y(7,downsample)']); % ZYX Euler plotTransforms(translations,rotations,... 'MeshFilePath','fixedwing.stl','InertialZDirection',"down") hold on plot3(simOut.y(1,:),-simOut.y(2,:),simOut.y(3,:),'--b') % full path xlim([-10.0 10.0]) ylim([-20.0 5.0]) zlim([-0.5 4.00]) view([-45 90]) hold off

Для фиксированных БПЛА для определения модели наведения БПЛА используются следующие уравнения. Используйте derivative функция для вычисления производной по времени состояния БПЛА, используя эти управляющие уравнения. Задайте входы используя state, control, и environment функций.
Положение БПЛА в земной системе координат [xe, ye, h] с ориентацией как угол рыскания, угол угла тангажа и угол вращения, [χ, γ, ϕ] в радианах.
Модель принимает, что БПЛА летает в условиях скоординированного поворота, с нулевым боковым скольжением. Автопилот управляет воздушной скоростью, высотой и углом крена. Соответствующие уравнения движения:
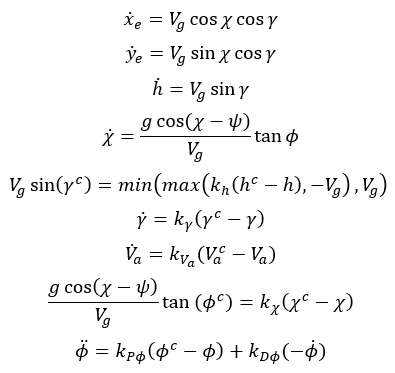
Va и Vg обозначают воздушные и наземные скорости БПЛА.
Скорость ветра задается как [Vwn, Vwe, Vwd] для северного, восточного и нисходящего направлений. Чтобы сгенерировать структуру для этих входов, используйте environment функция.
k* усиления контроллера. Чтобы задать эти усиления, используйте Configuration свойство fixedwing объект.
Из этих управляющих уравнений модель задает следующие переменные: ![]()
Эти переменные совпадают с выходными данными state функция.
[1] Рэндал У. Бород и Тимоти У. Маклейн. «Глава 9». Теория и практика малых беспилотных самолетов, NJ: Princeton University Press, 2012.
