Следуйте путевым точкам для БПЛА
БПЛА Toolbox/Алгоритмы
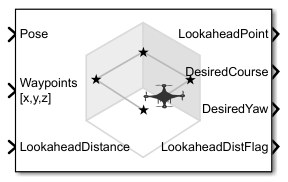
Блок Waypoint Follower следует набору путевых точек для беспилотного летательного транспортного средства (БПЛА) с помощью точки траектории. Блок вычисляет точку искомой головки, желаемый курс и желаемую рыскание с учетом положения БПЛА, набора точек пути и расстояния поисковой головки. Задайте набор путевых точек и настройте параметры расстояния и радиуса перехода для навигации по путевым точкам. Блок поддерживает как мультироторный, так и неподвижный типы БПЛА.
При следовании за набором путевых точек первая путевая точка может быть проигнорирована на основе положения БПЛА. Из-за особенностей расстояния, используемого для отслеживания пути, последующий блок путевой точки проверяет, находится ли БПЛА вблизи следующей точки пути, чтобы перейти к следующему сегменту контура с помощью переходной области. Однако существует также условие, когда БПЛА переходит, когда за пределы этой области. Гиперплоскость 3-D рисуется в следующей точке пути. Если положение БПЛА находится внутри этой гиперплоскости, последующая точка пути переходит к следующей точке пути. Такое поведение помогает обеспечить соответствие БПЛА достижимому пути.
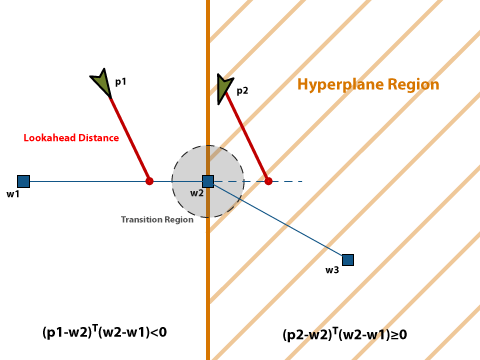
Условие гиперплоскости удовлетворяется, если:
(p - w1)T (w2 - w1) ≥ 0
p - положение БПЛА, а w1 и w2 - последовательные положения путевой точки.
Если вы находите, что это ограничение поведения, рассмотрите добавление большего количества точек пути на основе вашего начального положения, чтобы заставить последователя двигаться к вашей начальной точке пути.
[1] Park, Sanghyuk, John Deyst, and Jonathan How. Новая нелинейная логика руководства для отслеживания траектории. Конференция и приложение AIAA по руководству, навигации и управлению, 2004.
