Модель пониженного порядка для БПЛА
БПЛА Toolbox/Алгоритмы
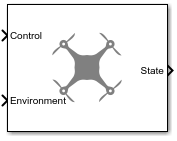
Блок Guidance Model представляет модель наведения небольшого беспилотного летательного транспортного средства (БПЛА), которая оценивает состояние БПЛА на основе управляющих и экологических входов. Модель аппроксимирует поведение системы с обратной связью, состоящей из контроллера автопилота и неподвижной или мультироторной кинематической модели для 3-D движения. Используйте этот блок как модель руководства пониженного порядка, чтобы симулировать свой БПЛА с неподвижным или мультироторным двигателем. Укажите ModelType для выбора типа БПЛА. Используйте вкладку Initial State, чтобы задать начальное состояние БПЛА в зависимости от типа модели. Вкладка Configuration определяет параметры управления и физические параметры БПЛА.
Для фиксированных БПЛА для определения модели наведения БПЛА используются следующие уравнения. Используйте derivative функция для вычисления производной по времени состояния БПЛА, используя эти управляющие уравнения. Задайте входы используя state, control, и environment функций.
Положение БПЛА в земной системе координат [xe, ye, h] с ориентацией как угол рыскания, угол угла тангажа и угол вращения, [χ, γ, ϕ] в радианах.
Модель принимает, что БПЛА летает в условиях скоординированного поворота, с нулевым боковым скольжением. Автопилот управляет воздушной скоростью, высотой и углом крена. Соответствующие уравнения движения:
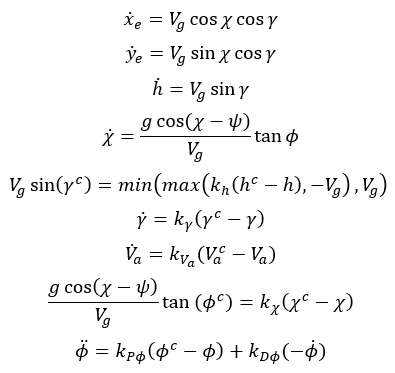
Va и Vg обозначают воздушные и наземные скорости БПЛА.
Скорость ветра задается как [Vwn, Vwe, Vwd] для северного, восточного и нисходящего направлений. Чтобы сгенерировать структуру для этих входов, используйте environment функция.
k* усиления контроллера. Чтобы задать эти усиления, используйте Configuration свойство fixedwing объект.
Из этих управляющих уравнений модель задает следующие переменные: ![]()
Эти переменные совпадают с выходными данными state функция.
Для мультироторов для определения модели наведения БПЛА используются следующие уравнения. Чтобы вычислить производную по времени состояния БПЛА, используя эти управляющие уравнения, используйте derivative функция. Задайте входы используя state, control, и environment.
Положение БПЛА в земной системе координат [xe, ye, ze] с ориентацией как Углы Эйлера ZYX, [ψ, ϴ, ϕ] в радианах. Скорости вращения [p, q, r] в радианах в секунду.
Каркас кузова БПЛА использует координаты как [xb, yb, zb].
Матрица вращения, которая вращается от мира к каркасу кузова, является:
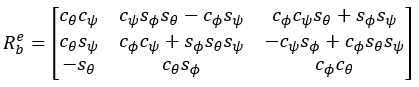
cos (x) и sin (x) сокращаются как cx и sx.
Ускорение центра масс БПЛА в земных координатах определяется:
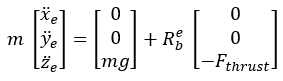
m - масса БПЛА, g - сила тяжести, а Fthrust - общая сила, создаваемая гребными винтами, приложенными к мультиротору вдоль оси - zb (точки вверх в горизонтальном положении).
Контроллер ориентации крена с обратной связью аппроксимируется поведением 2 независимых ПД-контроллеров для двух углов поворота и 2 независимых P-контроллеров для скорости рыскания и тяги. Скорость вращения, угловое ускорение и тяга управляются:
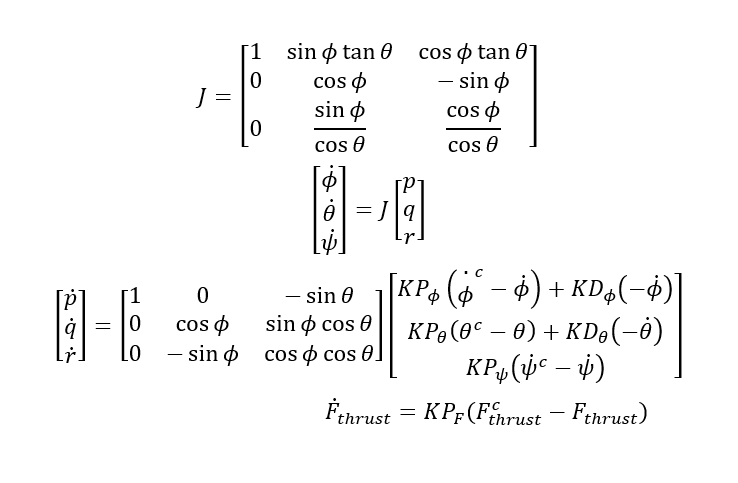
Эта модель принимает, что автопилот принимает в командном крене, тангаже, скорости рыскания, [c, ϴc, ϕ.c] и командуемая общая сила тяги, Fcтяга. Структура для задания этих входов сгенерирована из control.
Коэффициент усиления P и D для входов управления заданы как KPα и KDα, где α является углом поворота или упором. Эти усиления вместе с массой БПЛА, m, указаны в Configuration свойство multirotor объект.
Из этих управляющих уравнений модель задает следующие переменные: ![]()
Эти переменные совпадают с выходными данными state функция.
[1] Рэндал У. Бород и Тимоти У. Маклейн. «Глава 9». Теория и практика малых беспилотных самолетов, NJ: Princeton University Press, 2012.
[2] Меллинджер, Дэниел и Нейтан Майкл. «Траектория Генерации и управление для точных агрессивных маневров с квадроторами». Международный журнал исследований робототехники. 2012, с. 664-74.
