UAV Toolbox предоставляет среду ко-симуляции, которая моделирует алгоритмы вождения в Simulink® и визуализирует их эффективность в виртуальной среде симуляции. Это окружение использует Unreal Engine® из эпических игр®.
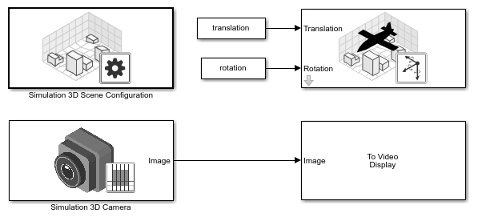
Блоки Simulink, относящиеся к среде симуляции, можно найти в библиотеке блоков UAV Toolbox > Simulation 3D. Эти блоки обеспечивают возможность:
Сконфигурируйте предварительно построенные сцены в среде симуляции.
Разместите и перемещайте БПЛА в этих сценах.
Установите датчики камеры и лидара на транспортных средствах.
Симулируйте выходы датчика на основе окружения вокруг БПЛА.
Получите достоверные данные для семантической сегментации и информации о глубине.
Этот инструмент симуляции обычно используется, чтобы дополнить реальные данные при разработке, тестировании и проверке эффективности алгоритмов рейса БПЛА. В сочетании с моделью транспортного средства БПЛА можно использовать эти блоки для выполнения реалистичных симуляций замкнутой системы, которое охватывает весь стек управления полетом БПЛА, от восприятия до управления.
Для получения дополнительной информации о среде симуляции смотрите Как работает Unreal Engine Simulation для БПЛА.
Для доступа к библиотеке UAV Toolbox > Simulation 3D в MATLAB® в командной строке введите uavsim3dlib.
Чтобы сконфигурировать модель для совместного моделирования со средой симуляции, добавьте блок Simulation 3D Scene Configuration к модели. Используя этот блок, вы можете выбрать из предварительно построенной сцены, где можно протестировать и визуализировать свои алгоритмы вождения. Следующее изображение - из US City Block сцены.
Тулбокс включает эти сцены.
| Сцена | Описание |
|---|---|
| US City Block | Городской блок с перекрестками, барьерами и светофорами |
Если у вас есть пакет поддержки UAV Toolbox Interface for Unreal Engine Projects, можно изменить эти сцены или создать новые таковые. Для получения дополнительной информации смотрите Настроить Unreal Engine Scenes для БПЛА.
Чтобы определить виртуальное транспортное средство в сцене, добавьте блок Simulation 3D BAV Vehicle к своей модели. Используя этот блок, вы можете управлять перемещением транспортного средства, задавая значения X, Y и yaw, которые определяют его положение и ориентацию на каждом временном шаге. Автоматически транспортное средство перемещается по земле.
Вы также можете задать цвет и тип транспортного средства. Тулбокс включает следующие типы транспортных средств:
Можно задать виртуальные датчики и прикрепить их в различных положениях на транспортных средствах. Тулбокс включает эти моделирование и блоки Configuration датчика.
| Блок | Описание |
|---|---|
| Simulation 3D Camera | Модель камеры с объективом. Включает параметры для размера изображения, фокусного расстояния, искажений и перекоса. |
| Simulation 3D Fisheye Camera | Fisheye-камера, которую можно описать с помощью модели камеры Scaramuzza. Включает параметры для центра искажений, размера изображения и коэффициентов отображения. |
| Simulation 3D Lidar | Сканирующая модель датчика лидара. Включает параметры для области значений обнаружения, разрешения и полей зрения. |
Для получения дополнительной информации о выборе датчика смотрите Выбор датчика для Unreal Engine Simulation.
Блоки симуляции UAV Toolbox обеспечивают инструменты для проверки и визуализации планирования пути, управления БПЛА и алгоритмов восприятия.
Можно использовать среду симуляции Unreal Engine, чтобы визуализировать движение транспортного средства в предварительно построенной сцене. Это окружение предоставляет вам способ анализа эффективности планирования пути и алгоритмов управления автомобиля. После разработки этих алгоритмов в Simulink, можно использовать uavsim3dlib библиотека для визуализации движения транспортного средства в одной из предварительно построенных сцен.
UAV Toolbox предоставляет несколько блоков для детального моделирования камеры и лидара. Путем установки этих датчиков на БПЛА в виртуальном окружении, вы можете сгенерировать синтетические данные о датчике или обнаружения датчика, чтобы проверить эффективность ваших моделей датчика на соответствие алгоритмам восприятия.
После того, как вы проектируете и тестируете систему восприятия в среде симуляции, можно использовать ее, чтобы управлять системой управления, которая фактически управляет транспортным средством. В этом случае, вместо того чтобы вручную настраивать траекторию, БПЛА использует систему восприятия, чтобы лететь самостоятельно. Объединяя восприятие и управление в систему с обратной связью в 3D среде симуляции, можно разработать и протестировать более сложные алгоритмы, такие как автоматизированная доставка.
