(Не рекомендуемый) Карта расхождения между стерео изображениями
disparity не рекомендуется. Использовать disparityBM или disparitySGM вместо этого. Для получения дополнительной информации см. «Вопросы совместимости»
disparityMap = disparity(I1,I2)disparityMap, для пары стереофонических изображений, I1 и I2.
disparityMap = disparity(I1,I2,Name,Value)Name,Value аргументы в виде пар.
Загрузите изображения и преобразуйте их в полутоновые.
I1 = imread('scene_left.png'); I2 = imread('scene_right.png');
Показать стерео анаглиф. Используйте красно-голубые стерео-очки для просмотра изображения в 3-D.
figure
imshow(stereoAnaglyph(I1,I2));
title('Red-cyan composite view of the stereo images');
Вычислите карту несоответствия.
disparityRange = [-6 10]; disparityMap = disparity(rgb2gray(I1),rgb2gray(I2),'BlockSize',... 15,'DisparityRange',disparityRange);
Отобразите карту несоответствия. Для лучшей визуализации используйте область значений несоответствия как отображение области значений для imshow.
figure
imshow(disparityMap,disparityRange);
title('Disparity Map');
colormap(gca,jet)
colorbar
I1 - Входное изображение 1Входное изображение, указанное как I1 соответствующий камере 1, указанный в 2-D полутоновом цвете. Стерео- изображения, I1 и I2, должны быть исправлены таким образом, чтобы соответствующие точки были расположены на тех же строках. Вы можете выполнить это исправление с rectifyStereoImages функция.
Можно улучшить скорость функции, установив класс I1 и I2 на uint8, и количество столбцов, которые будут делиться на 4. Вводите изображения I1 и I2 должно быть вещественным, конечным и нечетким. Они должны быть одним и тем же классом.
Типы данных: uint8 | uint16 | int16 | single | double
I2 - Входное изображение 2Входное изображение, указанное как I2 соответствующий камере 2, указанный в 2-D полутоновом цвете. Входные изображения должны быть выпрямлены так, чтобы соответствующие точки были расположены на тех же строках. Можно улучшить скорость функции, установив класс I1 и I2 на uint8, и количество столбцов, которые будут делиться на 4. Вводите изображения I1 и I2 должно быть вещественным, конечным и нечетким. Они должны быть одним и тем же классом.
Типы данных: uint8 | uint16 | int16 | single | double
Задайте необязательные разделенные разделенными запятой парами Name,Value аргументы. Name - имя аргумента и Value - соответствующее значение. Name должны находиться внутри кавычек. Можно задать несколько аргументов в виде пар имен и значений в любом порядке Name1,Value1,...,NameN,ValueN.
'Method', 'BlockMatching', задает 'Method' для свойства задано значение 'BlockMatching'.'Method' - Алгоритм оценки несоответствия'SemiGlobal' (по умолчанию) | 'BlockMatching'Алгоритм оценки диспаритета, заданный как разделенная разделенными запятой парами, состоящая из 'Method'и любой из них 'BlockMatching' или 'SemiGlobal'. Функция расхождения реализует основные блоки Matching [1] и Semi-Global Block Matching [3]. В 'BlockMatching' метод, функция вычисляет расхождение путем сравнения суммы абсолютных различий (SAD) каждого блока пикселей в изображении. В 'SemiGlobal' метод соответствия, функция дополнительно усиливает аналогичное расхождение на соседних блоках. Это дополнительное ограничение приводит к более полной оценке несоответствия, чем в 'BlockMatching' способ.
Алгоритмы выполняют следующие шаги:
Вычислите меру контрастности изображения с помощью фильтра Собеля.
Вычислите расхождение для каждого пикселя в I1.
Отметьте элементы карты различий, disparityMap, которые не были вычислены надежно. Функция использует -realmax('single'), чтобы пометить эти элементы.
'DisparityRange' - Область значений различий0 64] (по умолчанию) | двухэлементный вектор Область значений различий, заданный как разделенная разделенными запятой парами, состоящая из 'DisparityRange'и двухэлементный вектор. Двухэлементный вектор должен быть в формате [MinDisparity, MaxDisparity]. Оба элемента должны быть целым числом и могут быть отрицательными. MinDisparity и MaxDisparity должны находиться в области значений [- image width, image width]. Различия между MaxDisparity и MinDisparity должны быть разделены на 16. DisparityRange должно быть вещественным, конечным и нечетким. Если камера раньше брала I1 была справа от камеры, которую брали I2, тогда MinDisparity должны быть отрицательными.
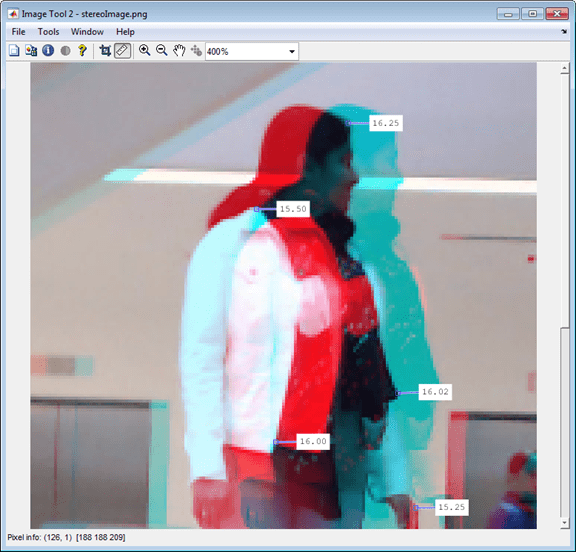
Область значений различий зависит от расстояния между двумя камерами и расстояния между камерами и объектом интереса. Увеличьте DisparityRange когда камеры находятся далеко друг от друга или объекты находятся рядом с камерами. Чтобы определить разумное расхождение для вашего строения, отобразите стерео-анаглиф входных изображений в imtool и используйте инструмент «Расстояние» для измерения расстояний между парами соответствующих точек. Измените MaxDisparity, чтобы оно соответствовало измерению.
'BlockSize' - Размер квадратного блока15 (по умолчанию) | нечетное целое числоРазмер квадратного блока, заданный как разделенная разделенными запятой парами, состоящая из 'BlockSize'и нечетное целое число в области значений [5255]. Это значение задает ширину для размера квадратного блока. Функция использует квадратный блок пикселей для сравнения между I1 и I2. BlockSize должно быть вещественным, конечным и нечетким.
'ContrastThreshold' - Контрастная пороговая область значений0.5 (по умолчанию) | скалярное значениеКонтрастный порог области значений, заданный как разделенная запятой пара, состоящий из 'ContrastThreshold'и скалярное значение в области значений (0,1]. Порог контрастности задает приемлемую область значений значений контрастности. Увеличение этого параметра приводит к тому, что меньше пикселей помечается как ненадежные ContrastThreshold. должно быть вещественным, конечным и нечетким.
'UniquenessThreshold' - Минимальное значение уникальности15 (по умолчанию) | неотрицательное целое числоМинимальное значение уникальности, заданное как разделенная разделенными запятой парами, состоящая из 'UniquenessThreshold'и неотрицательное целое число. Увеличение этого параметра приводит к тому, что функция помечает больше пикселей ненадежно. Когда значение уникальности для пикселя мало, вычисленное для него несоответствие менее надежно. Установка порога равного 0 отключает пороговое значение уникальности. UniquenessThreshold должно быть вещественным, конечным и нечетким.
Функция определяет уникальность как отношение оптимальной оценки несоответствия и менее оптимальной оценки несоответствия. Для примера:
| Позвольте K быть лучшим оценочным несоответствием, и позвольте V быть соответствующим значением SAD (Sum of Absolute Difference). |
| Рассмотрите V как наименьшее значение SAD за всю область значений расхождения, и v как наименьшее значение SAD за всю область значений расхождения, исключая K, K -1 и K + 1. |
Если v < V * (1+ 0.01* UniquenessThreshold), тогда функция помечает несоответствие для пикселя как ненадежное. |
'DistanceThreshold' - Максимальное расстояние для проверки изображения слева направо[] (disabled) (по умолчанию) | неотрицательное целое числоМаксимальное расстояние для проверки изображения слева направо между двумя точками, заданное как разделенная разделенными запятой парами, состоящая из 'DistanceThreshold'и неотрицательное целое число. Увеличение этого параметра результатов в меньшем количестве пикселей, помеченных как ненадежные. И наоборот, когда вы уменьшаете значение порога расстояния, вы увеличиваете надежность карты различий. Можно задать этот параметр в пустую матрицу [] чтобы отключить его. DistanceThreshold должно быть вещественным, конечным и нечетким.
Порог расстояния задает максимальное расстояние между точкой в I1 и та же точка, найденная от I2. Функция находит расстояние и помечает пиксель следующим образом:
| Пусть p 1 быть точкой в изображении I 1. |
| Шаг 1: Функция ищет лучшее соответствие точки p 1 в изображении I 2 (проверка слева направо) и находит точку p 2. |
| Шаг 2: Функция ищет лучшее p 2 в изображении I 1 (проверка справа налево) и находит точку p 3. |
Если поиск возвращает расстояние между p 1 и p 3 больше DistanceThresholdфункция помечает несоответствие для p 1 точки как ненадежное. |
'TextureThreshold' - Минимальный порог текстуры0.0002 (по умолчанию) | скалярное значениеМинимальный порог текстуры, заданный как разделенная разделенными запятой парами, состоящая из 'TextureThreshold'и скалярное значение в области значений [0, 1). Порог текстуры определяет минимальное значение текстуры для пикселя, чтобы быть надежным. Чем меньше текстура для блока пикселей, тем менее надежно вычисленное несоответствие для пикселей. Увеличение этого параметра приводит к тому, что большее количество пикселей помечается как ненадежное. Можно задать этот параметр как 0 чтобы отключить его. Этот параметр применяется только при установке Method на 'BlockMatching'.
Текстура пикселя определяется как сумма насыщенной контрастности, вычисленной по BlockSize-by- BlockSize окно вокруг пикселя. Функция считает расхождение, вычисленное для пикселя ненадежным и помечает его, когда текстура падает ниже значения, заданного:
Texture <X * TextureThreshold * BlockSize2
I1 и I2.
TextureThreshold должно быть вещественным, конечным и нечетким.
Если ваша получившаяся карта расхождения выглядит зашумленной, попробуйте изменить DisparityRange. Область значений различий зависит от расстояния между двумя камерами и расстояния между камерами и объектом интереса. Увеличьте DisparityRange когда камеры находятся далеко друг от друга или объекты находятся рядом с камерами. Чтобы определить разумное расхождение для вашего строения, отобразите стерео-анаглиф входных изображений в imtool и используйте инструмент «Расстояние» для измерения расстояний между парами соответствующих точек. Измените MaxDisparity, чтобы оно соответствовало измерению.
[1] Konolige, K., Small Vision Systems: Оборудование и Реализация, Proceedings of the VIII International Symposium in Robotic Research, pages 203-212, 1997.
[2] Bradski, G. and A. Kaehler, Learning OpenCV: Компьютерное зрение with the OpenCV Library, O'Reilly, Sebastopol, CA, 2008.
[3] Hirschmuller, H., Точная и Эффективная Стерео Обработка Полуглобальным Совпадением и Взаимной Информацией, Международная Конференция по Компьютерному Зрению и Распознаванию Шаблона, 2005.
estimateCameraParameters | estimateUncalibratedRectification | reconstructScene | rectifyStereoImages | Stereo Camera Calibrator
