Вычислите карту расхождения с использованием соответствия блоков
disparityMap = disparityBM(I1,I2)I1 и I2, при помощи метода соответствия блоков. Чтобы узнать больше об исправлении стерео изображений, смотрите Изображение Rectification.
disparityMap = disparityBM(I1,I2,Name,Value)
Загрузите исправленное стерео пары изображение.
I1 = imread('rectified_left.png'); I2 = imread('rectified_right.png');
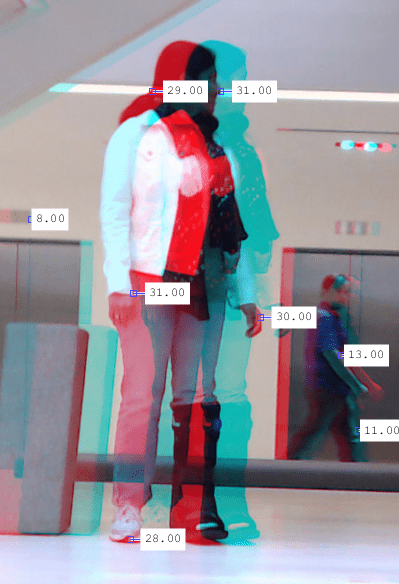
Создайте стерео-анаглиф исправленного стерео пары изображения и отобразите его. Просмотреть изображение в 3-D можно с помощью красно-голубых стерео очков.
A = stereoAnaglyph(I1,I2);
figure
imshow(A)
title('Red-Cyan composite view of the rectified stereo pair image')
Преобразуйте выпрямленные входные цветные изображения в полутоновые изображения.
J1 = im2gray(I1); J2 = im2gray(I2);
Вычислите карту несоответствия. Задайте область значений различий как [0, 48], и минимальное значение уникальности как 20.
disparityRange = [0 48]; disparityMap = disparityBM(J1,J2,'DisparityRange',disparityRange,'UniquenessThreshold',20);
Отобразите карту несоответствия. Установите область значений отображения на то же значение, что и область значений расхождения.
figure imshow(disparityMap,disparityRange) title('Disparity Map') colormap jet colorbar

Необходимо выбрать область значений расхождения, чтобы покрыть минимальное и максимальное количество горизонтального сдвига между соответствующими пикселями в исправленном стерео пары изображении. Можно определить приблизительные значения горизонтального сдвига по стерео-анаглифу изображения стерео пары. Вычислите стерео-анаглиф выпрямленных изображений с помощью stereoAnaglyph функция. Отобразите стерео-анаглиф в Image Viewer при помощи imtool функция. Чтобы измерить величину горизонтального сдвига между соответствующими точками в стерео пары изображении, выберите команду Измерить расстояние (Measure Distance) в меню Инструменты (Tools) в Image Viewer. Выберите минимальное и максимальное значения различия для области значений различий на основе этого измерения.
Для примера этот рисунок отображает стерео-анаглиф выпрямленного стерео- пары изображения и значения горизонтального сдвига, измеренные между соответствующими точками в стерео- паре изображении. Минимальное и максимальное значения сдвига вычисляются как 8 и 31 соответственно. На основе этих значений область значений различий может быть выбран как [0, 48].
[1] Konolige, K. «Small Vision Systems: Hardware and Implementation». В трудах 8-го Международного симпозиума по роботизированным исследованиям, стр. 203-212. 1997.
[2] Брадски, Г. и А. Келер. Обучение OpenCV: Компьютерное зрение с библиотекой OpenCV. Sebastopol, CA: O'Reilly Media, Inc. 2008.
