physical subsystem является Simulink® подсистема со связями Simscape™. Физическая подсистема со связями Simscape использует подход физической сети, которому удовлетворяют для симуляции систем с действительными физическими компонентами, и представляет математическую модель.
Используя поведения Simscape для компонентов в System Composer™ улучшает симуляцию модели и проект для систем с физическими компонентами. Эта функциональность требует лицензии Simscape. Для получения дополнительной информации смотрите Основные принципы Моделирования Физических сетей (Simscape).
Чтобы описать поведение компонента в Simscape для модели архитектуры System Composer, выполните эти шаги:
Откройте эту модель, чтобы взаимодействовать с моделью архитектуры System Composer под названием Fan с поведением Simscape на DC Motor компонента. Шаги в этом примере произведут эту модель.
Этот пример показывает двигатель постоянного тока в модели архитектуры вентилятора. Двигатель постоянного тока моделируется с помощью поведения Simscape в компоненте Подсистемы Simulink.

physical port представляет Simscape, физический порт коннектора моделирования вызвал Connection Port (Simscape). Используйте физические порты, чтобы соединить компоненты в модели архитектуры или включить физические системы в Подсистеме Simulink.
Создайте новую модель архитектуры System Composer. Добавьте компонент в холст под названием DC Motor. Чтобы добавить физические порты в компонент, сделайте паузу на контуре компонента, пока схема порта не появится. Кликните по схеме порта и, из опций, выберите Physical.
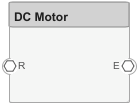
Физические порты могут позже использоваться, чтобы соединиться с блоками Simscape.
Можно задать физические интерфейсы на физических портах.
physical interface задает вид информации, которая течет через физический порт. Тот же интерфейс может быть присвоен нескольким портам. Физический интерфейс является составным интерфейсным эквивалентом Simulink.ConnectionBus объект, который задает по крайней мере один Simulink.ConnectionElement объект. Физический интерфейс эквивалентен Simulink.ConnectionBus объект, который задает по крайней мере один Simulink.ConnectionElement объект. Используйте физический интерфейс, чтобы связать физические элементы, чтобы описать физическую модель с помощью по крайней мере одной физической области.
physical element описывает разложение физического интерфейса. Физический элемент эквивалентен Simulink.ConnectionElement объект. Задайте Type из физического элемента как физическая область, чтобы включить использование той области в физической модели.
Чтобы открыть Интерфейсный Редактор, перейдите к Modeling> Design> Interface Editor. Интерфейсный Редактор откроется в нижней части холста.
Чтобы добавить новое физическое интерфейсное определение, кликните по списку рядом со![]() значком и выберите Physical Interface. Назовите физический интерфейс
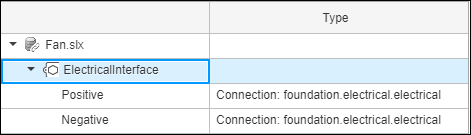
значком и выберите Physical Interface. Назовите физический интерфейс ElectricalInterface.
Чтобы добавить физический элемент в физический интерфейс, кликните![]() по значку. Физическими интерфейсными и физическими именами элементов должен быть допустимый MATLAB® имена переменных. Создайте физические элементы
по значку. Физическими интерфейсными и физическими именами элементов должен быть допустимый MATLAB® имена переменных. Создайте физические элементы Positive и Negative.
В столбце Type задайте область Simscape, которой принадлежат эти физические элементы. В этом случае оба принадлежат foundation.electrical.electrical.
Выберите E порт на DC Motor компонент. Щелкните правой кнопкой по ElectricalInterface физический интерфейс на Интерфейсном Редакторе и нажимает Assign to Selected Port(s).
Можно создать Подсистему Simulink в System Composer, чтобы включить прямое интегрирование Simscape. Для получения дополнительной информации смотрите, Создают Поведение Simulink Используя Подсистему Simulink.
Выберите DC Motor компонент. Перейдите к Modeling> Component> Create Simulink Behavior или используйте контекстное меню на компоненте.
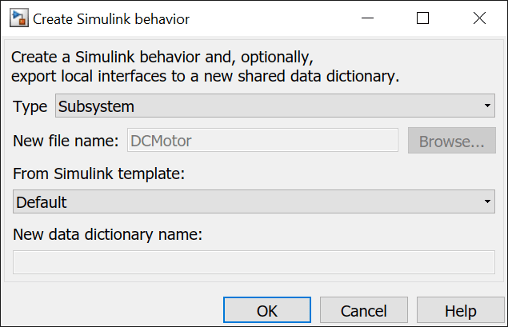
Нажмите OK.
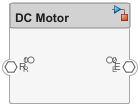
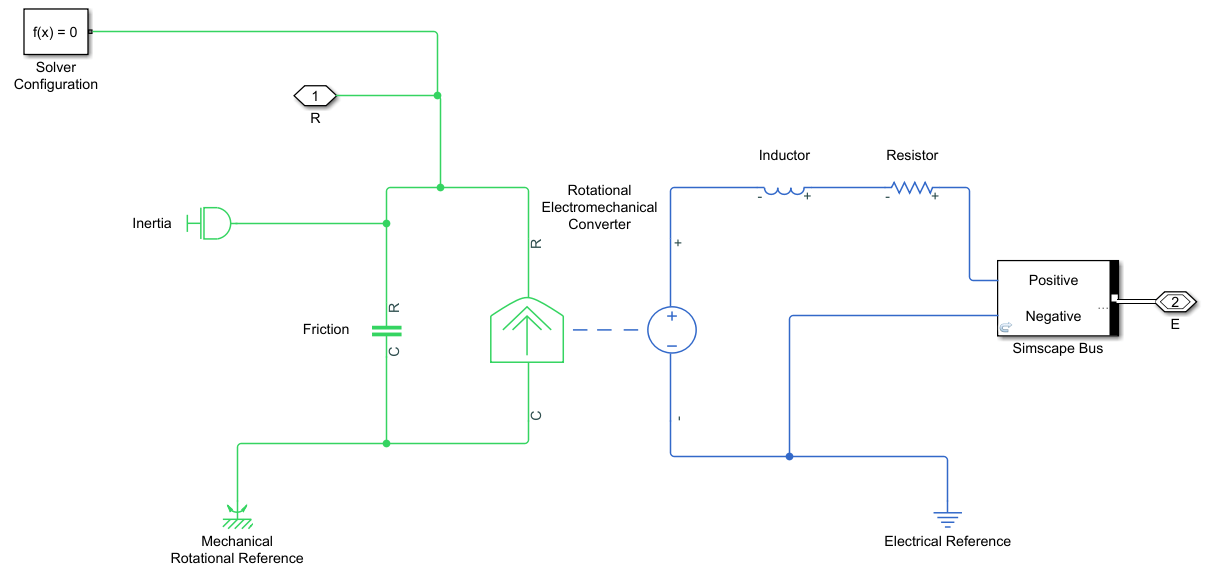
Дважды кликните компонент подсистемы, чтобы описать поведение компонента с помощью Simscape. Для двигателя постоянного тока этот пример на основе, смотрите Эффективность Оценки двигателя постоянного тока (Simscape).
Физический интерфейс может быть разложен на физические элементы с помощью шины Simscape. Каждый физический элемент представляет связь сохранения, сопоставленную областью в Simscape. Simscape соединяет шиной связи сохранения пакета. Для получения дополнительной информации смотрите Шину Simscape (Simscape).
Добавьте блок Simscape Bus рядом с E физический порт. Дважды кликните Simscape Bus и выберите тип подключения Bus: ElectricalInterface. Соедините E физический порт с блоком Simscape Bus. Доменный foundation.electrical.electrical заданный под Type Positive и Negative физические элементы используются для любых связей от этих портов.
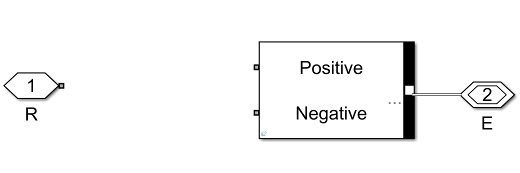
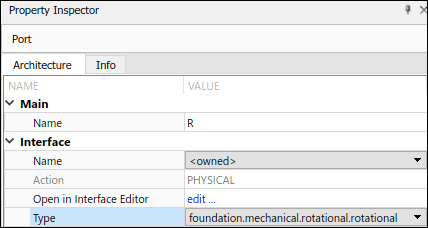
Вы можете также интерфейсы, находящиеся в собственности использования, заданные локально на портах, чтобы включить проблемно-ориентированные линии на модели поведения Simscape в System Composer. Отредактируйте интерфейс порта через Property Inspector. Перейдите к Modeling> Design> Property Inspector. В этом случае блоки Simscape Bus не нужны, и порт может соединиться непосредственно с физическим соединением заданной области. Добавьте находящийся в собственности физический интерфейс в физический порт R с Type как foundation.mechanical.rotational.rotational область. Выбор edit to Open in Interface Editor вводит Port Interface View в Интерфейсный Редактор. Для получения дополнительной информации смотрите, Задают Находящиеся в собственности Интерфейсы, Локальные для Портов.
Используя Браузер Библиотеки, получите следующие блоки Simscape и создайте модель двигателя постоянного тока с электрическими и вращательными механическими проблемно-ориентированными коннекторами.
physical connector может представлять ненаправленную связь сохранения определенной физической области. Коннекторы могут также представлять физические сигналы. Используйте физические коннекторы, чтобы соединить физические компоненты, которые представляют функции системы, чтобы симулировать математически. Для получения дополнительной информации смотрите Проблемно-ориентированные Стили линии (Simscape).
Физическое моделирование использует сетевой подход и поэтому отличается от регулярного моделирования Simulink. Для получения дополнительной информации смотрите Лучшие практики Моделирования (Simscape) и Ошибки Симуляции Поиска и устранения проблем (Simscape).
createSubsystemBehavior | addPort | addPhysicalInterface | addElement | setInterface | createInterface
