variable inertia является массовым элементом, масса которого, центр массы или тензор инерции могут отличаться в течение времени. Переменная инерция включает выкапываемое содержимое блока экскаватора типа обратная лопата, движущихся жителей бума manlift и хлюпающую жидкую загрузку замедляющейся автоцистерны. Вы моделируете переменную инерцию с помощью блока General Variable Mass от библиотеки Body Elements> Variable Mass. Этот блок принимает различные инерционные свойства как константы или переменные. Порты физического сигнала обеспечивают средние значения, чтобы задать переменные свойства.
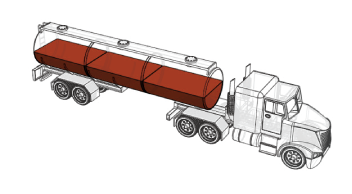
Жидкая загрузка как переменная инерция
Можно задать вводы переменной с помощью блоков Simulink® или Simscape™. Необходимо преобразовать любые Сигналы Simulink в физические сигналы с помощью блока Simulink-PS Converter. Избегайте внезапных изменений, когда они могут увеличить образцовую жесткость и замедлить симуляцию. Гарантируйте, что размерности сигнала соглашаются с портами:
Скаляр для массы (порт m)
Трехэлементный вектор для центра массы (порт com)
Матрица с девятью элементами для тензора инерции (порт I)
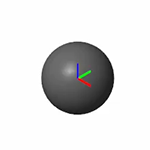
Переменная инерция, сопоставленная с Общими Переменными Массовыми блоками, не имеет никакой геометрии. Необходимо визуализировать эту инерцию как графические маркеры или как эквивалентные эллипсоиды инерции. Размерности эллипсоида и центр геометрии меняются в зависимости от массы, центра массы и тензора инерции, предоставляя эллипсоиды более информативной образцовой визуализации. Маркеры инерции показывают на образцовом обновлении и во время симуляции. Переменные эллипсоиды инерции показывают во время симуляции только. Данные показывают визуализацию инерции, представляющую жидкую загрузку, которую несет автоцистерна.
Эквивалентная визуализация эллипсоида инерции

Блок General Variable Mass получает инерционные эффекты только. Любые взаимодействия между переменной инерцией и другими компонентами модели должны быть смоделированы явным образом. Примеры взаимодействий включают силы контакта между жидкой загрузкой автоцистерны и окружающим корпусом. Они включают также изменение в импульс, полученный путем удаления продуктов сгорания двигательной установки — например, в морском пехотинце или космическом корабле. Используйте другой Simscape Multibody™, Simscape и блоки Simulink, чтобы получить взаимодействия как они.
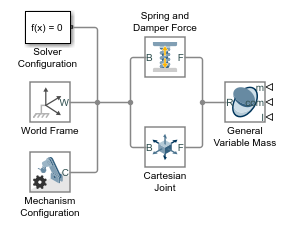
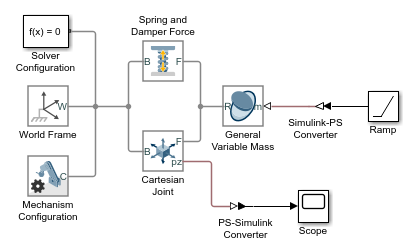
Создайте простую модель массово-пружинной системы, чтобы моделировать при постоянно-массовых и переменно-массовых условиях. Модель использует блок General Variable Mass, чтобы представлять контейнер, на который прогрессивно пропускается загрузка песка. Блок Cartesian Joint предоставляет переменно-массовому телу три переводных степени свободы, несмотря на то, что только один — вдоль вертикального z - оси — релевантен во время симуляции. Блок Spring и Damper Force представляет пружинный элемент, который соединяет переменно-массовое тело с Мировым кадром.

В командной строке MATLAB® введите smnew. Команда открывает образцовый шаблон с обычно используемыми блоками Simscape Multibody.
Добавьте следующие блоки в образцовый холст:
Общая Переменная Масса (Body Elements> Variable Mass)
Декартово соединение (Joints)
Spring и сила демпфера (Forces and Torques)
Соедините блоки как показано в фигуре и удалите остающиеся блоки. Гарантируйте, что объединенная ориентация блока как показано с портом опорной рамы, стоящим перед блоком World Frame.
В диалоговом окне блока Spring и Damper Force, установленном параметр Natural Length на 0.2 m и параметр Spring Stiffness к 10 N/m.
В диалоговом окне блока Cartesian Joint расширьте область Z Prismatic Primitive (Pz), установите флажок State Targets> Specify Position Target и установите параметр Value на 0.1 m.
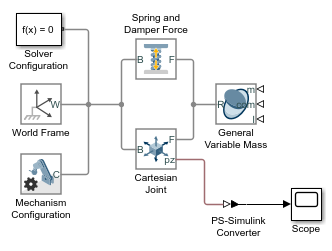
В диалоговом окне блока Cartesian Joint расширьте область Z Prismatic Primitive (Pz) и установите флажок Sensing> Position. Блок представляет выходной порт физического сигнала с положением кадра осциллятора.
Добавьте следующие блоки в образцовый холст:
Конвертер Simulink PS (Simscape> Foundation Library> Utilities)
Осциллограф (Simulink> Sinks)
Соедините блоки как показано в фигуре.
В диалоговом окне блока General Variable Mass, установленном параметр Type на Custom. Эта опция позволяет вам смоделировать переменное массовое распределение с вращательной инерцией.
Установите Mass, Center of Mass и параметры Inertia Matrix к Constant и Mass> параметр Value к 0.2 kg.
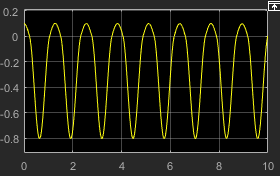
Запустите симуляцию (Simulation> Run) и откройте блок Scope. График показывает положение ссылочного кадра переменной массы. Обратите внимание на то, что частота колебания и амплитудное пребывание, постоянное в течение симуляции.
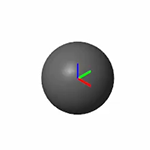
Mechanics Explorer открывается 3-D анимацией модели. Визуализация включает только эллипсоид инерции — здесь сфера из-за симметрии тензора инерции по умолчанию, используемого в модели. В панели меню выберите View> Show Frames, чтобы показать все кадры в модели. Обратите внимание на то, что размерности эллипсоида останавливаются постоянными во время симуляции, отражая постоянные инерционные свойства, заданные в модели.
В диалоговом окне блока General Variable Mass, набор Center of Mass и параметры Inertia Matrix каждый к Constant. Порты физического сигнала раньше отличались, их значения во время симуляции становятся скрытыми, оставляя только твердую массу как переменную.
Добавьте эти блоки в образцовый холст:
Конвертер PS Simulink (Simscape> Foundation Library> Utilities)
Пандус (Simulink> Sources)
Соедините блоки как показано в фигуре.
В диалоговом окне блока Ramp, установленном параметр Slope на 0.1 и параметр Initial output к 0.2. Сигнал Пандуса передается блоку General Variable Mass в единицах Simscape по умолчанию массы, kg. Сигнал соответствует постоянно увеличивающейся массе, которая запускается в 0.2 kg и заканчивается в 1.2 kg после 10-секундной симуляции.
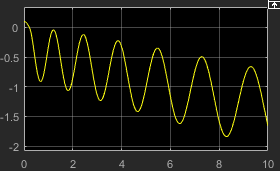
Запустите симуляцию и откройте блок Scope. График положения показывает переменную частоту колебания и амплитуду. Увеличивающаяся масса заставляет частоту колебания увеличиваться и амплитуда, чтобы уменьшиться.
Mechanics Explorer обновляет результаты визуализации. Обратите внимание на то, что уменьшение размерностей эллипсоида как симуляция прогрессирует, отражая их обратную пропорциональность переменной массе.