Усиление модели и неопределенность фазы
Используйте umargin блок системы управления, чтобы смоделировать усиление и изменения фазы обратной связи. Моделирование усиления и изменений фазы вашей системы позволяет вам проверить запасы устойчивости во время анализа робастности или осуществить их во время устойчивого проектирования контроллера.
Чтобы добавить усиление и неопределенность фазы к обратной связи, вы включаете umargin блоки в неопределенное пространство состояний (uss) модель системы с обратной связью. umargin блок системы управления SISO, представляя усиление и изменение фазы в одном местоположении в одной обратной связи. Чтобы смоделировать усиление и неопределенность фазы в системах с обратной связью MIMO, вставьте отдельный umargin объект в каждом местоположении в системе, в которой вы хотите ввести неопределенность фазы и усиление.
umargin усиление моделей и изменения фазы как факторный F, умножающий ответ разомкнутого цикла L. Этот фактор принимает значения в диске, сосредоточенном на вещественной оси и содержащий F = 1. Вы задаете этот диск его пересечением DGM = [gmin,gmax] с вещественной осью, которая представляет относительный объем изменения усиления вокруг номинальной стоимости F = 1. Чтобы задать и усиление и неопределенность фазы, сначала используйте getDGM получить DGM значение, которое описывает диск, который получает и ваше заданное усиление и области значений фазы. Для получения дополнительной информации о находящейся на диске модели неопределенности, см. Алгоритмы.
Когда у вас есть uss модель, содержащая umargin блоки системы управления, можно выполнить робастность и анализ худшего случая, чтобы исследовать, как изменение усиления и фазы влияет на ответ системы. Например, используйте robstab и robgain анализировать устойчивую устойчивость и устойчивую производительность системы с неопределенностью фазы и усилением. Используйте wcgain и wcsigmaplot исследовать ответы худшего случая системы.
Требование устойчивой устойчивости для системы с обратной связью с umargin неопределенность усиления и фазы эквивалентна осуществлению находящегося на диске запаса по амплитуде [gmin,gmax] и соответствующий запас по фазе. Поэтому можно использовать umargin блоки, чтобы осуществить подходящие дисковые поля при разработке устойчивых контроллеров с musyn.
F = umargin(name,DGM)DGM = [gmin,gmax] с gmin <1 и gmax > 1. Усиление смоделировано F варьируется по этой области значений для фазы, сохраненной по ее номинальной стоимости. Когда у вас будут и усиление и неопределенность фазы, используйте getDGM найти соответствующий DGM. Этот синтаксис также устанавливает Name свойство F.
F = umargin(name,GM)umargin(name,[1/GM,GM]). Этот синтаксис задает усиление, которое может увеличиться или уменьшиться факторным GM в отсутствие неопределенности фазы. Соответствующая сумма неопределенности фазы определяется находящейся на диске моделью неопределенности что umargin использование (см. Алгоритмы).
F = umargin(___,Name,Value)F использование пар "имя-значение". Например, F = umargin('F',[0.8,1.4],'InputName','u0','OutputName','u') создает umargin блокируйтесь и определяет имена ввода и вывода для использования с connect. Заключите каждое имя свойства в кавычки.
Много функций, которые работают над числовыми моделями LTI также, работают над неопределенными блоками системы управления, такими как umargin. Они включают функции соединения моделей, такие как connect и feedback, и линейный анализ функционирует, такие как bode и stepinfo. Некоторые функции, которые генерируют графики, такие как bode и step, постройте случайные выборки неопределенной модели, чтобы дать вам смысл распределения неопределенной динамики. Когда вы используете эти команды, чтобы возвратить данные, однако, они работают с номинальной стоимостью системы только. Следующие списки содержат представительное подмножество функций, которые можно использовать с umargin модели.
Создайте модель цикла управления SISO с неопределенностью усиления ±6 дБ и неопределенностью фазы ±30 °. Используйте передаточную функцию разомкнутого цикла
.
L = tf(2.5,[1 2 3 0]);
Чтобы смоделировать неопределенность, сначала используйте getDGM преобразовывать усиление и изменение фазы в находящуюся на диске область значений запаса по амплитуде. Поскольку усиление может увеличиться или уменьшиться той же суммой, можно использовать 'balanced' опция, чтобы смоделировать диск неопределенности, которая симметрична вокруг номинальной стоимости.
GM = db2mag(6);
PM = 30;
DGM = getDGM(GM,PM,'balanced')DGM = 1×2
0.5012 1.9953
DGM задает диск неопределенности с изменениями усиления области значений, данной DGM, и изменения фазы определяются геометрией диска. Используйте DGM создать umargin блок.
F = umargin('F',DGM)F = Uncertain gain/phase "F" with relative gain change in [0.501,2] and phase change of ±36.8 degrees.
F представляет самый маленький диск неопределенности, который может получить и целевое усиление и изменение фазы. Фактическое изменение фазы смоделировано F немного больше, чем целевой диапазон ±30 °. Визуализировать полный спектр усиления и изменений фазы, представленных F, включая одновременное усиление и изменения фазы, используйте plot.
plot(F)

Правильный график показывает область значений значений в комплексной плоскости что мультипликативный факторный F может взять. Размер диска определяет объем изменения. Теневая область на левом графике показывает одновременные изменения усиления и фазы, охваченной в F. Для получения дополнительной информации об этой модели неопределенности, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
Чтобы включить усиление и неопределенность фазы в модель системы с обратной связью, вставьте его в обратную связь как мультипликативный фактор на ответе разомкнутого цикла.

T = feedback(L*F,1)
T =
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 3 states.
The model uncertainty consists of the following blocks:
F: Uncertain gain/phase, gain × [0.501,2], phase ± 36.8 deg, 1 occurrences
Type "T.NominalValue" to see the nominal value, "get(T)" to see all properties, and "T.Uncertainty" to interact with the uncertain elements.
Результатом является неопределенное пространство состояний (uss) модель с одним блоком системы управления, F. Исследуйте эффект смоделированного усиления и неопределенности фазы на переходном процессе системы с обратной связью.
figure; rng default % for reproducibility step(T)

Можно выполнить анализ сложения с этой моделью, такой как анализ системной робастности против смоделированного усиления и изменения фазы с robstab. Или, можно использовать musyn спроектировать устойчивый контроллер для неопределенной системы L*F. Для примеров смотрите
Создайте umargin блокируйте то усиление моделей, которое может уменьшиться на 10%, но увеличиться на 60% в отсутствие изменения фазы и изменения фазы ±15 ° в отсутствие изменения усиления. Для этого используйте getDGM с 'tight' опция. Эта опция находит самый маленький диск, который получает усиление и спектры фазы, которые вы предоставляете.
DGM = getDGM([0.9,1.6],[-15,15],'tight'); F = umargin('F',DGM)
F = Uncertain gain/phase "F" with relative gain change in [0.86,1.6] and phase change of ±15 degrees.
В этом случае самый маленький диск охватывает заданное изменение фазы и изменение усиления, которое немного больше, но все еще скашивается к увеличениям усиления. Визуализируйте соответствующий диск и области значений усиления и изменений фазы, смоделированных F.
plot(F)

Левый график показывает, что смоделированное изменение усиления не симметрично вокруг номинальной стоимости.
Сгенерируйте другой umargin блокируйтесь, на этот раз с помощью 'balanced' опция в getDGM.
DGMb = getDGM([0.9,1.6],[-15,15],'balanced'); Fb = umargin('Fb',DGMb);
Сравните диск неопределенности, смоделированный каждым блоком.
figure;
diskmarginplot([F.GainChange;Fb.GainChange],'disk')
Диск Fb моделирует большую, симметричную область значений усиления (gmin = 1/gmax) и большие изменения фазы, чем те вы задаете. Если вы уверены, что усиление варьируется больше по одному направлению, чем другой в вашей системе, то эта сбалансированная сила модели чрезмерно консервативна.
umargin блок представляет усиление SISO и неопределенность фазы. Чтобы смоделировать усиление и изменения фазы обратной связи MIMO, создайте umargin блокируйтесь для каждого местоположения в цикле, в котором вы хотите ввести изменение фазы и усиление. Например, рассмотрите 2D вход, 2D выходную обратную связь примера Запасы устойчивости MIMO для Вращения Спутника.

Предположим, что вы хотите изучить поведение системы с усилением и изменениями фазы при вводах и выводах объекта. Можно смоделировать те изменения путем создания отдельного umargin блоки для каждого канала и встраивание их в модель с обратной связью.

Создайте объект и модели контроллеров от Запасов устойчивости MIMO для Вращения Спутника. Объект является 2D входом, 2D выходной моделью в пространстве состояний, и фильтр feedforward, Kf является 2D входом, 2D выход статическое усиление.
% Plant a = 10; A = [0 a;-a 0]; B = eye(2); C = [1 a;-a 1]; D = 0; P = ss(A,B,C,D); % Prefilter Kf = [1 -a;a 1]/(1+a^2);
Затем создайте umargin блоки, чтобы представлять усиление и неопределенность фазы в каждом канале. Предположим, что вы хотите смоделировать неопределенность усиления приблизительно в 5% в любом направлении во всех четырех местах. Создайте umargin блокируйтесь, чтобы смоделировать эту неопределенность.
GM = 1.05;
u1 = umargin('u1',GM)u1 = Uncertain gain/phase "u1" with relative gain change in [0.952,1.05] and phase change of ±2.79 degrees.
umargin преобразует изменение усиления specifed ±5% к находящейся на диске модели неопределенности, которая также позволяет фазовые переходы приблизительно ±3 °. Используйте plot визуализировать диск и смоделированную область значений усиления и изменения фазы при каждом вводе и выводе.
plot(u1)

Чтобы получить наилучшие оценки удара усиления и неопределенности фазы на производительности системы, вы хотите, чтобы усиление и фаза варьировались независимо в каждом этих четырех местах. Поэтому создайте дополнительный umargin блоки для каждого ввода и вывода объекта, с той же спецификацией усиления.
u2 = umargin('u2',GM); y1 = umargin('y1',GM); y2 = umargin('y2',GM);
Создайте модель с обратной связью, вставив u1 и u2 во входных параметрах объекта и y1 и y2 на объекте выходные параметры. Для этого используйте blkdiag объединить u1 и u2 в 2D вход, 2D выходную систему формы [u1,0;0,u2]. Создайте подобную комбинацию y1 и y2.Затем соедините их с объектом и используйте feedback команда, чтобы закрыть двухканальную обратную связь.
Fu = blkdiag(u1,u2); Fy = blkdiag(y1,y2); L = Fy*P*Fu; Tunc = feedback(L,eye(2))*Kf
Tunc =
Uncertain continuous-time state-space model with 2 outputs, 2 inputs, 2 states.
The model uncertainty consists of the following blocks:
u1: Uncertain gain/phase, gain × [0.952,1.05], phase ± 2.79 deg, 1 occurrences
u2: Uncertain gain/phase, gain × [0.952,1.05], phase ± 2.79 deg, 1 occurrences
y1: Uncertain gain/phase, gain × [0.952,1.05], phase ± 2.79 deg, 1 occurrences
y2: Uncertain gain/phase, gain × [0.952,1.05], phase ± 2.79 deg, 1 occurrences
Type "Tunc.NominalValue" to see the nominal value, "get(Tunc)" to see all properties, and "Tunc.Uncertainty" to interact with the uncertain elements.
Исследуйте эффект этих изменений на отклике системы.
rng(1) % for reproducibility
figure
step(Tunc,Tunc.NominalValue,10)
Эта маленькая неопределенность оказывает значительное влияние на производительность системы, иногда даже изменяя знак ответа. Анализ робастности с robstab показывает, что только немного большее изменение управляет нестабильной системой с обратной связью.
stabmarg = robstab(Tunc)
stabmarg = struct with fields:
LowerBound: 1.0210
UpperBound: 1.0231
CriticalFrequency: 1.0000e-04
Требование, чтобы система с обратной связью была устойчива против конкретной суммы усиления и неопределенности фазы, эквивалентно высказыванию, что система имеет ту сумму запаса по амплитуде и фазе. Можно поэтому использовать umargin блокируйтесь, чтобы проверять запасы по амплитуде и фазе системы, которая также требует робастности против других типов неопределенности. Для этого получите свои необходимые дисковые поля в umargin блокируйтесь и используйте robstab проверять устойчивую устойчивость по всей неопределенности, смоделированной в системе.
Рассмотрите следующую систему с обратной связью с неопределенностью параметра.
k = ureal('k',10,'Percent',40); G = tf(18,[1 k k]); C = pid(1,2); CL = feedback(G*C,1);
robstab показывает, что система устойчива против смоделированной неопределенности. На самом деле система остается устойчивой два немного более двух раз смоделированная неопределенность.
stabmarg = robstab(CL)
stabmarg = struct with fields:
LowerBound: 2.0458
UpperBound: 2.0458
CriticalFrequency: 4.4517
Предположим, что вы также требуете, чтобы система терпела увеличение усиления или уменьшение до 50% и изменение фазы до ±20 ° во входе объекта. Чтобы проверять, имеет ли система эти поля, создайте umargin блокируйтесь это моделирует эти изменения, и вставьте его в модель с обратной связью.
DGM = getDGM(1.5,20,'tight'); F = umargin('F'); Gf = G*F; CLf = feedback(Gf*C,1); stabmarg = robstab(CLf)
stabmarg = struct with fields:
LowerBound: 1.0939
UpperBound: 1.0962
CriticalFrequency: 3.9081
Этот результат показывает, что в дополнение к устойчивой устойчивости против изменения параметра, обратная связь также обеспечивает желаемые запасы по амплитуде и фазе для всех смоделированных значений k (на самом деле для приблизительно на 9% больше, чем смоделированная область значений k).
Можно также использовать эквивалентность между дисковыми полями и устойчивой устойчивостью, чтобы получить и поэтапно осуществить изменения, чтобы спроектировать устойчивый контроллер, который удовлетворяет определенным запасам по амплитуде и фазе. Для примеров см. Проект Устойчивый Контроллер С Заданными Запасами по амплитуде и фазе и Устойчивый Контроллер для Вращения Спутника.
Устойчивый контроллер возвращен musyn оптимизирует устойчивую производительность неопределенных систем с обратной связью. Когда неопределенный объект содержит umargin блоки, это требование устойчивой устойчивости эквивалентно осуществлению находящихся на диске запасов по амплитуде и фазе, равных umargin неопределенность. В этом примере спроектируйте устойчивый контроллер для неопределенного объекта, осуществив устойчивость с обратной связью против усиления и изменений фазы при вводах и выводах объекта.
Используйте объект из примера "Формирование цикла с mixsyn"на mixsyn страница с описанием, вводя некоторую неопределенность в месте системных полюсов и нуля.
a = ureal('a',1,'PlusMinus',[-0.1,0.1]); s = zpk('s'); G = (s-a)/(s+a)^2;
Цель состоит в том, чтобы осуществить устойчивость с обратной связью против усиления и изменения фазы при вводах и выводах объекта по полному спектру изменения параметра, смоделированного на объекте G. Для этого используйте целевые запасы по амплитуде и фазе, чтобы создать umargin неопределенные блоки и присоединяют их к объекту. В данном примере предположите, что вы хотите устойчивость против изменений усиления фактора 1,5 или в направлении или в изменениях фазы ±20 °.
DGM = getDGM(1.5,20,'tight'); Fin = umargin('Fin',DGM); Fout = umargin('Fout',DGM); Gmarg = Fout*G*Fin
Gmarg =
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 7 states.
The model uncertainty consists of the following blocks:
Fin: Uncertain gain/phase, gain × [0.667,1.5], phase ± 22.6 deg, 1 occurrences
Fout: Uncertain gain/phase, gain × [0.667,1.5], phase ± 22.6 deg, 1 occurrences
a: Uncertain real, nominal = 1, variability = [-0.1,0.1], 3 occurrences
Type "Gmarg.NominalValue" to see the nominal value, "get(Gmarg)" to see all properties, and "Gmarg.Uncertainty" to interact with the uncertain elements.
Для настройки с musyn, вы увеличиваете объект с функциями взвешивания, которые осуществляют ваше требование к производительности, такое как отслеживание уставки, подавление помех и робастность. В данном примере используйте функции взвешивания, описанные в примере на на mixsyn страница с описанием.
W1 = makeweight(10,[1 0.1],0.01); W2 = makeweight(0.1,[32 0.32],1); W3 = makeweight(0.01,[1 0.1],10); Gaug = augw(Gmarg,W1,W2,W3);
Используйте musyn спроектировать контроллер.
[K,gam] = musyn(Gaug,1,1);
D-K ITERATION SUMMARY:
-----------------------------------------------------------------
Robust performance Fit order
-----------------------------------------------------------------
Iter K Step Peak MU D Fit D
1 7.753 1.527 1.539 24
2 1.131 1.084 1.093 38
3 0.9988 0.9964 1.005 36
4 0.9963 0.9947 0.9966 36
5 0.9959 0.9943 1.001 36
Best achieved robust performance: 0.994
musyn достигает устойчивой производительности приблизительно 1, который говорит вам, что усиление с обратной связью остается ниже 1 для полного спектра неопределенности, заданной на объекте. Чтобы подтвердить, что получившийся контроллер достигает целевых запасов по амплитуде и фазе, используйте wcdiskmargin исследовать запасы по амплитуде и фазе худшего случая системы против одновременных изменений при вводах и выводах объекта. Используйте объект G это содержит неопределенность параметра, но не неопределенность фазы и усиление.
MMIO = wcdiskmargin(G,K)
MMIO = struct with fields:
GainMargin: [0.6030 1.6584]
PhaseMargin: [-27.8217 27.8217]
DiskMargin: 0.4954
LowerBound: 0.4954
UpperBound: 0.4963
CriticalFrequency: 1
WorstPerturbation: [1x1 struct]
Худший случай находящийся на диске запас по амплитуде [0.6 1.66] немного больше, чем целевое поле [0.66 1.5], и запас по фазе худшего случая ±28 °, аналогично лучше, чем необходимое поле ±20 °. Таким образом, контроллер K осуществляет желаемые поля для целой области значений неопределенности параметра объекта G.
Для примера, который использует umargin блоки с musyn чтобы осуществить запасы по амплитуде и фазе в цикле управления MIMO, смотрите Устойчивый Контроллер для Вращения Спутника.
umargin усиление моделей и изменения фазы отдельной обратной связи образовывают канал как зависимый частотой мультипликативный фактор F (s) умножение номинального ответа разомкнутого цикла L (s), такой, что встревоженным ответом является L (s) F (s). Факторный F (s) параметрируется:
В этой модели,
δ (s) является ограниченной усилением динамической неопределенностью, нормированной так, чтобы это всегда варьировалось в единичном диске (|| δ || ∞ <1).
ɑ устанавливает сумму усиления и изменения фазы, смоделированного F. Для фиксированного E параметр ɑ управляет размером диска. Для ɑ = 0, мультипликативный фактор равняется 1, соответствуя номинальному L.
E, названный eccentricity, скашивает смоделированную неопределенность к увеличению усиления или уменьшению усиления.
Факторный F принимает значения в диске, сосредоточенном на вещественной оси и содержащий номинальную стоимость F = 1. Диск характеризуется его прерыванием DGM = [gmin,gmax] с вещественной осью. gmin <1 и gmin > 1 минимальные и максимальные относительные изменения в усилении, смоделированном F, в номинальной фазе. Неопределенность фазы, смоделированная F, является областью значений DPM = [pmin,pmax] из значений фазы в номинальном усилении (|F | = 1). Например, в следующем графике, правая сторона показывает диску F, который пересекает вещественную ось в интервале [0.71 1.4]. Левая сторона показывает, что этот диск моделирует изменение усиления ±3 дБ и изменение фазы ±19 °.
F = umargin('F',1.4125)
plot(F)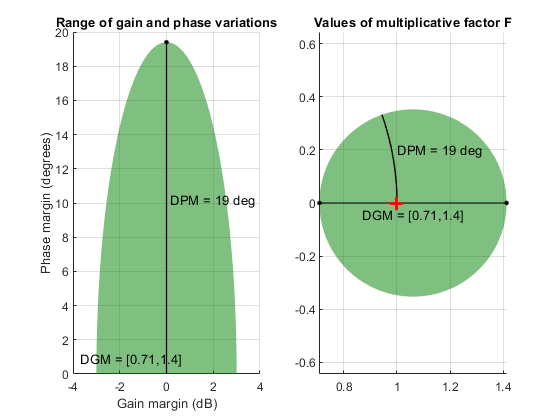
Когда вы создаете umargin блокируйтесь, вы задаете сумму неопределенности путем определения DGM. Используйте getDGM переводить определенные суммы усиления и фазы в изменениях к подходящему DGM область значений, которая получает эти изменения. Для получения дополнительной информации о неопределенности модель используется umargin, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
