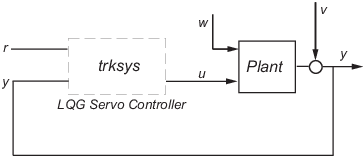
В этом примере показано, как сконструировать сервоконтроллер для следующей системы.
Установка имеет три состояния (x), два управляющих входа (u), два случайных входа (w), один выход (y), шум измерения для выхода (v) и следующие уравнения состояния и измерения:
где
0,61] H = [− 1,2 − 0,89]
Система имеет следующие данные ковариации шума:
vvT) = 0,7
Используйте следующую функцию затрат, чтобы определить компромисс между производительностью трекера и усилиями по управлению:
1002] u) dt
Для проектирования сервоконтроллера LQG для этой системы:
Создайте систему пространств состояний, введя в окне команд MATLAB следующее:
A = [0 1 0;0 0 1;1 0 0]; B = [0.3 1;0 1;-0.3 0.9]; G = [-0.7 1.12; -1.17 1; .14 1.5]; C = [1.9 1.3 1]; D = [0.53 -0.61]; H = [-1.2 -0.89]; sys = ss(A,[B G],C,[D H]);
Создайте оптимальный коэффициент усиления обратной связи по состоянию с использованием данной функции затрат, введя следующие команды:
nx = 3; %Number of states ny = 1; %Number of outputs Q = blkdiag(0.1*eye(nx),eye(ny)); R = [1 0;0 2]; K = lqi(ss(A,B,C,D),Q,R);
Создайте оценщик состояния Калмана, используя заданные данные ковариации шума, введя следующие команды:
Qn = [4 2;2 1]; Rn = 0.7; kest = kalman(sys,Qn,Rn);
Подключите устройство оценки состояния Калмана и оптимальный коэффициент усиления обратной связи для формирования сервоконтроллера LQG, введя следующую команду:
trksys = lqgtrack(kest,K)
>> trksys = lqgtrack(kest,K)
a =
x1_e x2_e x3_e xi1
x1_e -2.373 -1.062 -1.649 0.772
x2_e -3.443 -2.876 -1.335 0.6351
x3_e -1.963 -2.483 -2.043 0.4049
xi1 0 0 0 0
b =
r1 y1
x1_e 0 0.2849
x2_e 0 0.7727
x3_e 0 0.7058
xi1 1 -1
c =
x1_e x2_e x3_e xi1
u1 -0.5388 -0.4173 -0.2481 0.5578
u2 -1.492 -1.388 -1.131 0.5869
d =
r1 y1
u1 0 0
u2 0 0
Input groups:
Name Channels
Setpoint 1
Measurement 2
Output groups:
Name Channels
Controls 1,2
Continuous-time model.
