При наличии программного обеспечения Simulink ® Control Design™ можно вычислить неопределенную линеаризацию, т.е. модель неопределенного состояния-пространства (uss) объединение неопределенных переменных с линеаризованной динамикой. Используйте uss модель для выполнения линейного анализа и надежной конструкции управления.
Неопределенную линеаризацию можно вычислить одним из следующих способов.
Использование ulinearize , как описано в разделе Получение модели неопределенного состояния-пространства из модели Simulink.
Использование управляющей конструкции Simulink
linearizeКоманда « Управление симуляцией» (Simulink Control Design), как описано в разделе «Задание неопределенной линеаризации для основных или пользовательских блоков симуляции».
Чтобы получить модель неопределенного состояния-пространства из модели, содержащей блоки пространства неопределенного состояния, выполните следующие действия.
Примечание
Если в модели отсутствуют блоки пространства неопределенного состояния, но необходимо получить модель пространства неопределенного состояния, см. раздел Задание неопределенной линеаризации для основных или пользовательских блоков симулятора.
(Обязательное условие) Создание или открытие модели Simulink.
(Обязательное условие) В модели Simulink укажите входные и выходные точки линеаризации с помощью модуля Simulink Control Design
getlinio или linio команды. Дополнительные сведения см. в разделе Задание части модели для линеаризации (Simulink Control Design).
(Обязательное условие) Если это еще не сделано, укажите неопределенность в модели Simulink, как описано в разделе Задание неопределенности с помощью блоков пространства неопределенного состояния.
Примечание
Программа не оценивает неопределенные переменные во время линеаризации. Таким образом, значение неопределенности не влияет на линеаризацию.
Управляемый ulinearize для вычисления неопределенной линеаризации. Эта команда возвращает uss модель.
Примечание
При использовании программы Simulink Control Design
linearize (Simulink Control Design), блоки «Неопределенное пространство состояния» линеаризуются до номинального значения.
Дополнительные сведения о линеаризации и способах оценки результатов см. в разделе Основы линеаризации (Simulink Control Design).
Пример использования программы Simulink Control Design
linearize Команда (Simulink Control Design), см. Линеаризация моделей Simulink с неопределенностью.
В некоторых случаях нельзя использовать блоки «Пространство неопределенного состояния» в модели Simulink, поскольку модель используется совместно или создается код. По-прежнему можно учитывать неопределенность в линейном анализе без указания неопределенности с помощью блоков пространства неопределенного состояния. Toolbox™ надежного управления позволяет указать ядро или пользовательский блок Simulink для линеаризации в неопределенную переменную. Линеаризация создает неопределенное состояние-пространство uss модель. Указанная неопределенность связана только с блоком и не влияет на моделирование модели. Дополнительные сведения см. в разделе Задание линейной системы для линеаризации блоков с использованием выражения MATLAB (Simulink Control Design).
Примечание
Если в модели имеются блоки пространства неопределенного состояния и требуется получить модель пространства неопределенного состояния, см. раздел Получение модели пространства неопределенного состояния из модели Simulink.
Чтобы задать блоки для линеаризации в неопределенные переменные и получить неопределенную модель состояния-пространства, выполните следующие действия.
(Предварительные условия) Создание или открытие модели Simulink. Задание входных и выходных точек линеаризации с помощью модуля Simulink Control Design
getlinio или linio команды.
В этом примере можно открыть модель. rct_ulinearize_builtin.
Укажите блок для линеаризации с неопределенной переменной:
Щелкните правой кнопкой мыши блок и выберите «Линейный анализ» > «Задать линеаризацию выбранного блока».
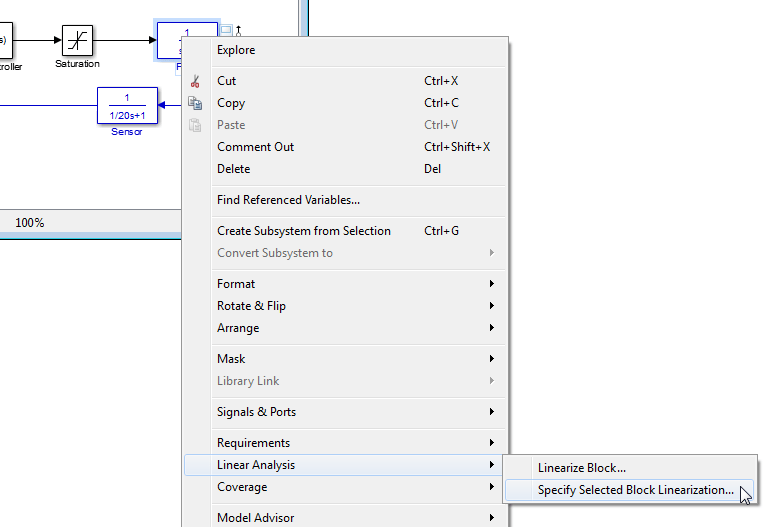
Это действие открывает диалоговое окно Спецификация линеаризации блоков (Block Linearization Specification).
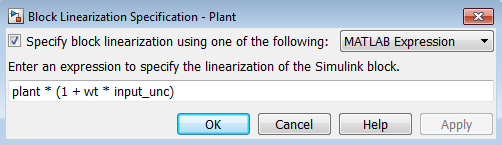
В диалоговом окне «Спецификация линеаризации блоков» установите флажок «Задать линеаризацию блоков», используя одно из следующих значений:. Установка этого флажка позволяет указать неопределенную переменную для линеаризации.
Этот флажок по умолчанию имеет значение MATLAB Expression в раскрывающемся меню. Этот параметр позволяет задать блок для линеаризации в неопределенную переменную с помощью выражения MATLAB ®, содержащего функции надёжного элемента управления. Дополнительные сведения о параметрах см. в разделе Задание линейной системы для линеаризации блоков с помощью выражения MATLAB (Simulink Control Design).
В поле Ввести выражение для задания линеаризации блока Simulink введите выражение, которое должно вычисляться до неопределенной переменной или неопределенной модели, например ureal, umat, ultidyn, umargin, или uss.
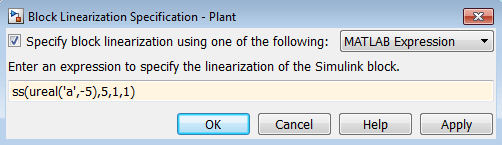
Нажмите кнопку ОК, чтобы сохранить изменения.
Примечание
В командной строке также можно задать блок для линеаризации неопределенной переменной. Пример см. в разделе Линеаризация блока симулятора в неопределенную модель.
Запустить linearize для вычисления неопределенной линеаризации. Эта команда возвращает uss модель.
Дополнительные сведения о линеаризации и способах проверки результатов линеаризации см. в разделе Основные сведения о линеаризации (Simulink Control Design).
Для примера использования linearize команду для вычисления неопределенной линеаризации см. в разделе Линеаризация моделей Simulink с неопределенностью.
После вычисления неопределенной линеаризации можно выполнить любые задачи анализа или конструирования, выполняемые для любой линейной модели, включая:
Выполните анализ надежности. См. раздел Надежность и наихудший анализ.
Выполнение надежной конструкции управления. См. раздел Надежная настройка контроллера.
ulinearize | linearize (Simulink Control Design)
