Приложение «Конструктор сценариев вождения» предоставляет библиотеку готовых сценариев, представляющих общие маневры вождения. Приложение также включает сценарии, представляющие протоколы тестирования Европейской программы оценки новых автомобилей (Euro NCAP ®) и кубовидные версии заранее построенных сцен, используемых в среде моделирования 3D.
Для начала откройте приложение «Конструктор сценариев управления». В командной строке MATLAB ® введитеdrivingScenarioDesigner.
В приложении предварительно созданные сценарии хранятся в виде MAT-файлов и организованы в папки. Чтобы открыть предварительно созданный файл сценария, на панели инструментов приложения выберите «Открыть» > «Предварительно созданный сценарий». Затем выберите готовый сценарий из одной из папок.
Эти сценарии представляют протоколы тестирования Euro NCAP. Приложение включает в себя сценарии для тестирования систем автономного экстренного торможения, аварийного поддержания полосы движения и вспомогательного обслуживания полосы движения. Дополнительные сведения см. в разделе Сценарии вождения Euro NCAP в конструкторе сценариев вождения.
Эти сценарии включают общие схемы движения на четырехсторонних перекрестках и перекрестках с круговым движением.
| Имя файла | Описание |
|---|---|
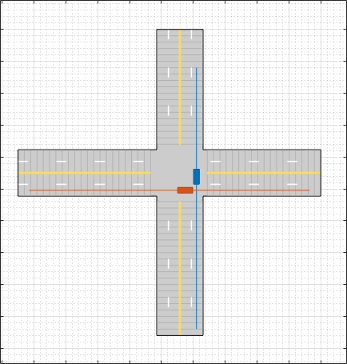
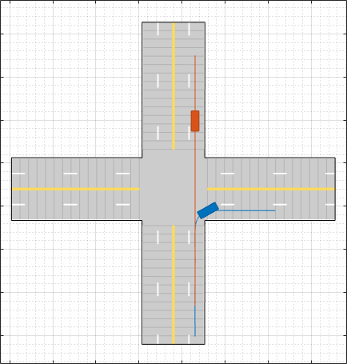
EgoVehicleGoesStraight_BicycleFromLeftGoesStraight_Collision.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Велосипед, идущий с левой стороны перекрестка, идет прямо и сталкивается с эго-транспортным средством.
|
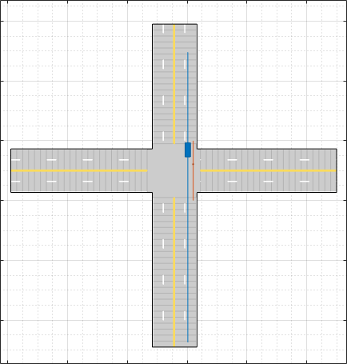
EgoVehicleGoesStraight_PedestrianToRightGoesStraight.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Пешеход в полосе справа от эго-транспортного средства также едет на север и идет прямо через перекресток.
|
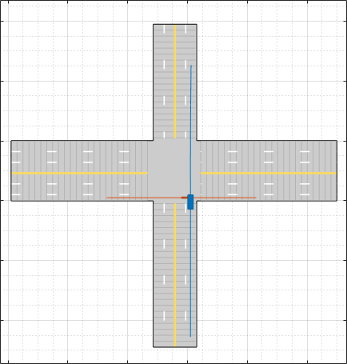
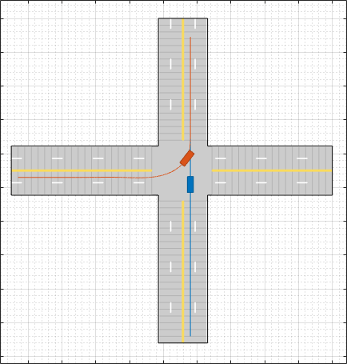
EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство, идущее с левой стороны перекрестка, также идет прямо. Эго-транспортное средство пересекается перед другим транспортным средством.
|
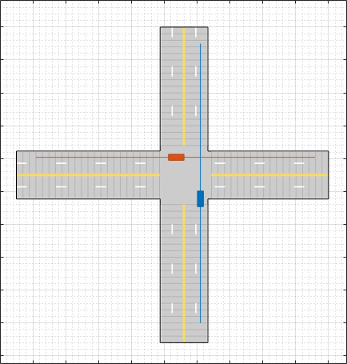
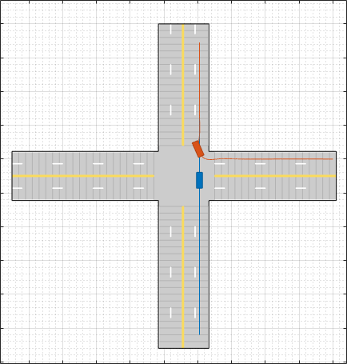
EgoVehicleGoesStraight_VehicleFromRightGoesStraight.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство, идущее с правой стороны перекрестка, также идет прямо и пересекает перекресток первым.
|
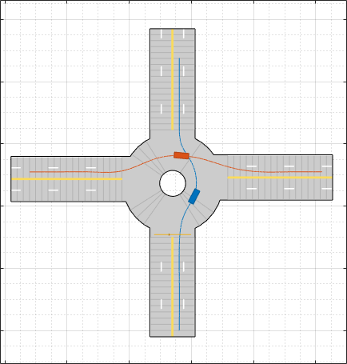
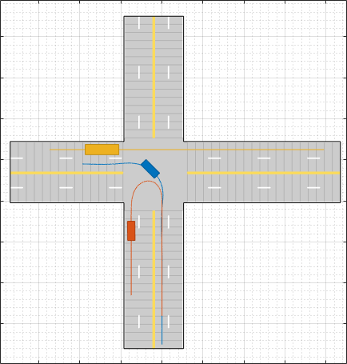
Roundabout.mat | Эго-автомобиль едет на север и пересекает путь пешехода, заходя на круговой перекресток. Эго-транспортное средство затем пересекает путь другого транспортного средства, когда оба транспортных средства движутся через круговой перекресток.
|
Эти сценарии являются кубовидными версиями нескольких предварительно созданных сцен, доступных в среде моделирования 3D. К этим сценариям можно добавить транспортные средства и траектории. Затем можно включить эти транспортные средства и траектории в модель Simulink ®, чтобы моделировать их в среде 3D. Эта среда визуализируется с помощью Unreal Engine ® от Epic Games ®. Дополнительные сведения об этих сценариях см. в разделе Cuboid Versions of 3D Simulation Scenes в конструкторе сценариев управления.
Эти сценарии включают повороты на четырехсторонних перекрестках.
| Имя файла | Описание |
|---|---|
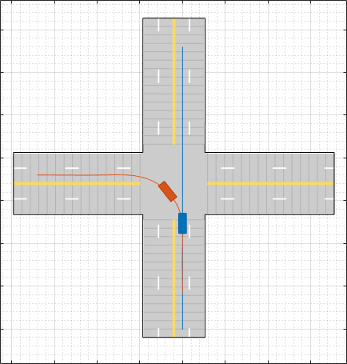
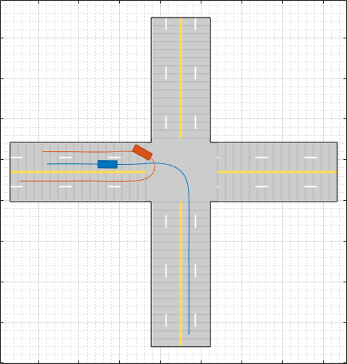
EgoVehicleGoesStraight_VehicleFromLeftTurnsLeft.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство, идущее с левой стороны перекрестка, поворачивает налево и оказывается перед эго-транспортным средством.
|
EgoVehicleGoesStraight_VehicleFromRightTurnsRight.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство, идущее с правой стороны перекрестка, поворачивает направо и оказывается перед эго-транспортным средством.
|
EgoVehicleGoesStraight_VehicleInFrontTurnsLeft.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство перед эго-транспортным средством поворачивает налево на перекрестке.
|
EgoVehicleGoesStraight_VehicleInFrontTurnsRight.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство перед эго-транспортным средством поворачивает прямо на перекрестке.
|
EgoVehicleTurnsLeft_PedestrianFromLeftGoesStraight.mat | Эго-автомобиль едет на север и поворачивает налево на перекрестке. Пешеход, идущий с левой стороны перекрестка, идет прямо. Эго-автомобиль завершает свою очередь до того, как пешеход доедет до пересечения перекрестка.
|
EgoVehicleTurnsLeft_PedestrianInOppLaneGoesStraight.mat | Эго-автомобиль едет на север и поворачивает налево на перекрестке. Пешеход на противоположной полосе идет прямо через перекресток. Эго-автомобиль завершает свою очередь до того, как пешеход доедет до пересечения перекрестка.
|
EgoVehicleTurnsLeft_VehicleInFrontGoesStraight.mat | Эго-автомобиль едет на север и поворачивает налево на перекрестке. Транспортное средство перед эго-транспортным средством проходит прямо через перекресток.
|
EgoVehicleTurnsRight_VehicleInFrontGoesStraight.mat | Эго-автомобиль едет на север и поворачивает направо на перекрестке. Транспортное средство перед эго-транспортным средством проходит прямо через перекресток.
|
Эти сценарии включают развороты на четырехсторонних пересечениях.
| Имя файла | Описание |
|---|---|
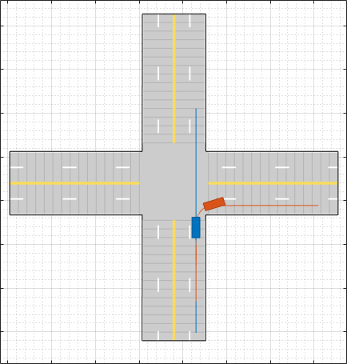
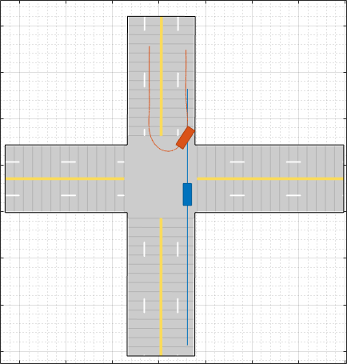
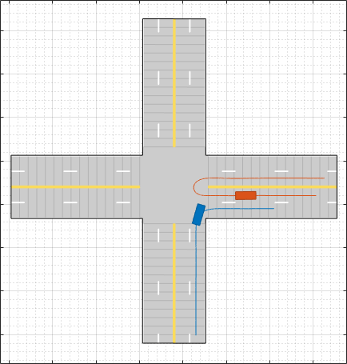
EgoVehicleGoesStraight_VehicleInOppLaneMakesUTurn.mat | Эго-автомобиль едет на север и идет прямо через перекресток. Транспортное средство на противоположной полосе делает разворот. Эго-машина оказывается позади машины.
|
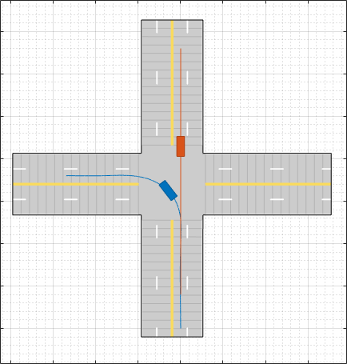
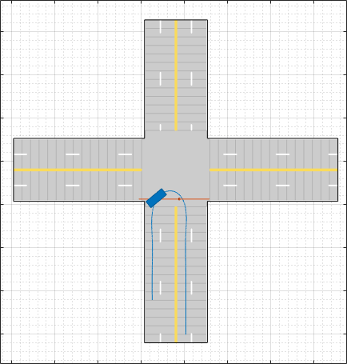
EgoVehicleMakesUTurn_PedestrianFromRightGoesStraight.mat | Эго-автомобиль едет на север и совершает разворот на перекрестке. Пешеход, идущий с правой стороны перекрестка, идет прямо и пересекает путь разворота.
|
EgoVehicleMakesUTurn_VehicleInOppLaneGoesStraight.mat | Эго-автомобиль едет на север и совершает разворот на перекрестке. Транспортное средство, движущееся на юг в противоположном направлении, идет прямо и оказывается позади эго-транспортного средства.
|
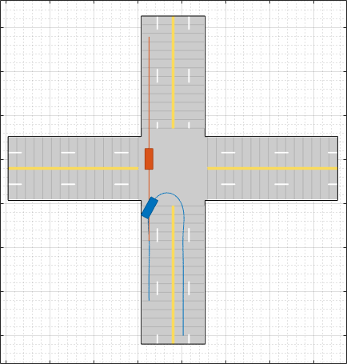
EgoVehicleTurnsLeft_Vehicle1MakesUTurn_Vehicle2GoesStraight.mat | Эго-автомобиль едет на север и поворачивает налево на перекрестке. Транспортное средство перед эго-транспортным средством совершает разворот на перекрестке. Второй автомобиль, грузовик, идет с правой стороны перекрестка. Машина эго оказывается на полосе рядом с грузовиком.
|
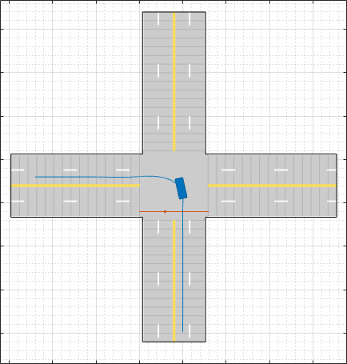
EgoVehicleTurnsLeft_VehicleFromLeftMakesUTurn.mat | Эго-автомобиль едет на север и поворачивает налево на перекрестке. Транспортное средство, идущее с левой стороны перекрестка, совершает разворот. Эго-транспортное средство оказывается на полосе рядом с другим транспортным средством.
|
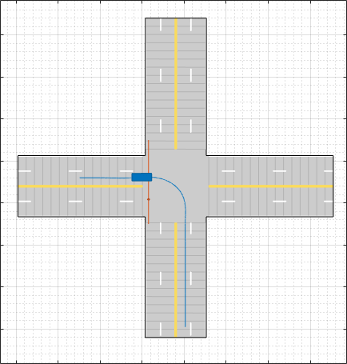
EgoVehicleTurnsRight_VehicleFromRightMakesUTurn.mat | Эго-автомобиль едет на север и поворачивает направо на перекрестке. Транспортное средство, идущее с правой стороны перекрестка, совершает разворот. Эго-транспортное средство оказывается позади транспортного средства, в соседней полосе.
|
После выбора сценария можно изменить параметры дорог и актеров. Например, на вкладке Актеры (Actors) слева можно изменить положение или скорость эго-транспортного средства или других актеров. На вкладке «Дороги» можно изменить ширину полос или тип разметки полос.
Можно также добавлять или изменять датчики. Например, на вкладке «Датчики» можно изменить параметры обнаружения или положения датчиков. По умолчанию в сценариях Euro NCAP эго-автомобиль не содержит датчиков. Все остальные заранее разработанные сценарии имеют по меньшей мере одну фронтальную камеру или радиолокационный датчик, установленный для обнаружения полос движения и объектов.
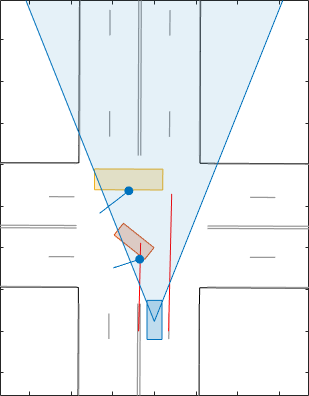
Чтобы создать обнаружения от датчиков, на панели инструментов приложения нажмите кнопку Выполнить. По мере выполнения сценария Ego-Centric View отображает сценарий с точки зрения ego-транспортного средства. На графике птичьего глаза отображаются обнаруженные объекты.
Экспортируйте данные датчика.
Чтобы экспортировать данные датчика в рабочую область MATLAB, на панели инструментов приложения выберите Экспорт > Экспорт данных датчика. Назовите переменную рабочего пространства и нажмите кнопку ОК. Приложение сохраняет данные датчика как структуру, содержащую данные датчика, такие как позиции актера, обнаружения объектов и обнаружения полос движения на каждом шаге времени.
Для экспорта функции MATLAB, генерирующей сценарий и данные датчика, выберите Экспорт > Экспорт функции MATLAB. Эта функция возвращает данные датчика в виде структуры, сценарий в виде drivingScenario и модели датчиков как системные объекты. Путем изменения этой функции можно создать варианты исходного сценария. Пример этого процесса см. в разделе Программное создание вариантов сценария управления.
Поскольку предварительно созданные сценарии доступны только для чтения, сохраните копию сценария управления в новой папке. Чтобы сохранить файл сценария, на панели инструментов приложения выберите Сохранить > Файл сценария как.
Этот файл сценария можно повторно открыть из приложения. Кроме того, этот синтаксис можно использовать в командной строке MATLAB.
drivingScenarioDesigner(scenarioFileName)
drivingScenario объект. В командной строке MATLAB используйте этот синтаксис, где scenario - имя экспортируемого объекта.drivingScenarioDesigner(scenario)
sensors является объектом датчика или массивом ячеек таких объектов.drivingScenarioDesigner(scenario,sensors)
drivingScenario объект в модели. Этот блок не считывает данные датчика напрямую. Чтобы добавить датчики, созданные в приложении, в модель Simulink, создайте модель, содержащую сценарий и датчики, выбрав Экспорт > Экспорт модели Simulink. В модели сгенерированный блок чтения сценариев считывает сценарий, а сгенерированные блоки датчиков определяют датчики.drivingRadarDataGenerator | drivingScenario | insSensor | lidarPointCloudGenerator | visionDetectionGenerator