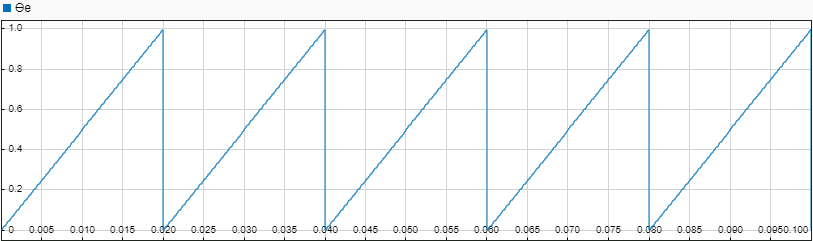
Сформировать рампу положения фиксированной частоты
Блок управления двигателем/элементы управления/ссылка на элемент управления
Блок генератора положения генерирует сигнал изменения положения (с частотой, которая идентична частоте сигнала опорного напряжения), используя значение приращения положения опорного сигнала.
Рекомендуется использовать для этого блока дискретный решатель с фиксированным шагом, чтобы обеспечить генерацию кода и точное моделирование.
3-Phase Генератор синусоидального напряжения | Модуль оценки скорости проскальзывания ACIM | Синусоидальный поиск | Ссылка на управление вектором




