Вращающийся привод двойного действия в системе изотермической жидкости
Simscape/Жидкости/Изотермическая жидкость/Исполнительные механизмы

Блок однонаправленного поворотного привода (IL) моделирует поворотный привод, который преобразует давление жидкости в механический крутящий момент в изотермической жидкостной сети. Движение поршня, когда он близок к полному удлинению или полной уборке, ограничивается одной из трех моделей жесткой остановки.
Порт А представляет собой изотермическое отверстие для сохранения жидкости, связанное с входом камеры для жидкости. Каналы R и C являются механическими каналами экономии вращения, связанными с вращающимся валом и корпусом исполнительного механизма соответственно. Если для параметра «Механическая ориентация» задано значение Pressure at A causes positive rotation of R relative to Cдавление в жидкостной камере вызывает положительное вращение вала в отверстии R относительно отверстия C. Когда угол вала вычисляется внутри, физическое сигнальное отверстие q сообщает об этом угле. Когда угол устанавливается соединением с соединением Simscape™ Multibody™, он принимается как физический сигнал на порте q.
Смещение поршня измеряется как положение в отверстии R относительно отверстия C. Механическая ориентация определяет направление перемещения поршня. Перемещение поршня нейтрально, или 0, когда объем камеры равен мертвому объему. При приеме смещения в качестве входа убедитесь, что производная положения равна скорости поршня. Это происходит автоматически в том случае, когда входные данные поступают от соединения блока «Вращательный многожильный интерфейс» к соединению Simscape Multibody.
Чтобы избежать механических повреждений исполнительного механизма, когда он полностью выдвинут или полностью убран, исполнительный механизм обычно демонстрирует нелинейное поведение, когда поршень приближается к этим пределам. Блок однонаправленного поворотного привода (IL) моделирует это поведение с помощью выбора из трех моделей жесткого упора, которые моделируют соответствие материала с помощью пружинной демпферной системы. Модели жесткого останова:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Сила жесткой остановки моделируется, когда поршень находится на верхней или нижней границе. Граничная область находится в пределах переходной области начального перемещения хода или поршня. За пределами этой области 0.
Дополнительные сведения об этих параметрах см. на странице Вращающийся блок жесткого останова.
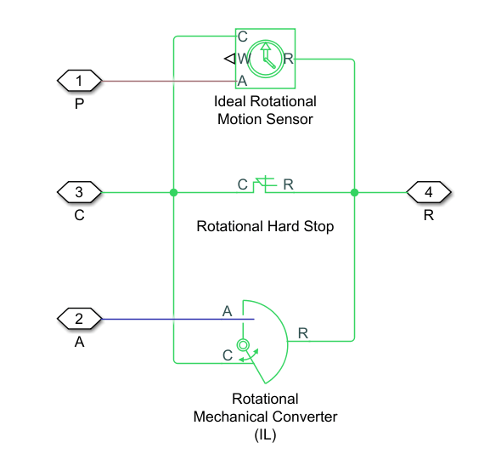
Исполнительный блок состоит из трех блоков библиотеки фундаментов:
Нижележащие компоненты блока
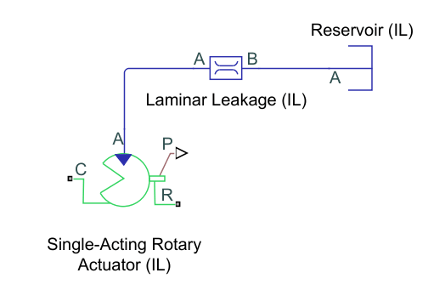
Ламинарная утечка не учитывается в блоке однонаправленного поворотного привода (IL). Чтобы включить утечку в моделирование, задайте для параметра геометрии поперечного сечения значение Custom и подключите порт A к порту A блока Laminar Leakth (IL). Подключите порт B блока ламинарной утечки (IL) к блоку резервуара (IL).
Добавление утечки в моделирование
Привод двойного действия (IL) | Поворотный привод двойного действия (IL) | Вращающийся исполнительный механизм одностороннего действия (IL) | Привод одностороннего действия (IL)

