Пары сцеплений собачий конус, установленные симметрично относительно поступательного фиксатора для обеспечения плавного зацепления зубчатой передачи
Simscape/Трансмиссия/Сцепления
Блок представляет собой двусторонний синхронизатор, который содержит две сцепные муфты «спина к спине», две сцепные муфты «спина к спине» и один фиксатор поступательного движения. Смещение соединения в отрицательном направлении приводит к тому, что муфты входят в зацепление с кольцом ступицы A. Смещение соединения в положительном направлении приводит к тому, что муфты входят в зацепление с кольцом ступицы B. Когда величина перемещения переключения соединения меньше, чем зазор между кольцом и ступицей конической муфты, синхронизатор находится в нейтральном режиме и не передает крутящий момент.
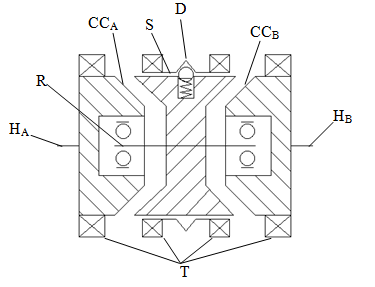
Схема иллюстрирует двусторонний синхронизатор в отключенном состоянии. В этом состоянии кольцо, R и ступица, HA и HB, валы могут вращаться независимо на разных скоростях. По мере того, как передаточное звено S перемещается в отрицательном направлении, грани конической муфты A (CCA) входят в контакт. Трение в конической муфте уменьшает разность скоростей вращения между валами. Когда усилие на рычаге переключения превышает пиковое усилие фиксатора, D, зубья T сцепления собачки могут входить в зацепление. Пиковое усилие фиксатора должно быть таким, чтобы коническая муфта имела достаточное время и нормальное усилие для доведения валов до достаточно одинаковых скоростей, чтобы обеспечить зацепление собачьей муфты. Аналогичным образом, поступательное перемещение передаточного звена в положительном направлении позволяет контактировать поверхностям конической муфты В (CCB) и может обеспечивать зацепление вала кольца с валом ступицы В (HB).
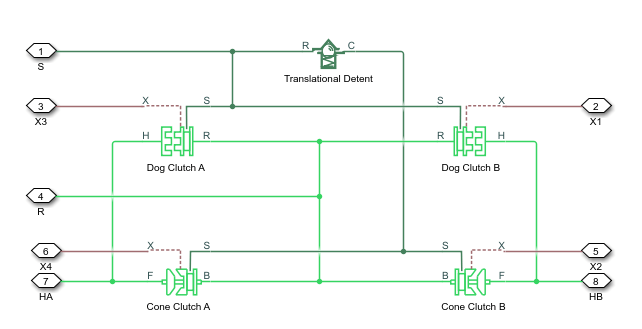
Модель реализует два блока Dog Clutch, два блока Cone Clutch и один блок Translational Detent. Дополнительные сведения о соответствующей функции блока см. на каждой странице ссылок на блоки.
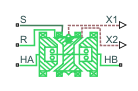
Соединения R, HA и HB являются механическими вращательными консервационными портами, которые представляют кольцо, R, концентратор A (HA) и концентратор B (HB) соответственно. Соединение S представляет собой механический поступательный консервационный порт, который представляет ручку переключения кольца .
Соединения X1 и X2 являются физическими сигнальными портами, которые выдают положения переключения сцепления собачьих и конических муфт соответственно. В таблицах приведены значения X1 и X2 в общих случаях зацепления муфты.
| Состояние сцепления собак | X1 |
|---|---|
| Разъединенный | 0 |
| Полностью взаимодействует с концентратором A | Отрицательная сумма зазора между кольцом и ступицей и высоты зуба |
| Полностью взаимодействует со ступицей B | Положительная сумма зазора между кольцом и ступицей и высоты зуба |
| Состояние конической муфты | X2 |
|---|---|
| Разъединенный | 0 |
| Полностью взаимодействует с концентратором A | Отрицательное значение зазора кольцо-ступица |
| Полностью взаимодействует со ступицей B | Положительное значение зазора между кольцом и ступицей |
При полном отключении синхронизатора значения X1 и X2 равны нулю. Когда муфта собачки полностью сцеплена со ступицей А, X1 равна отрицательной сумме ее зазора между кольцом и ступицей и высоты зуба. Когда муфта собачки полностью сцеплена со ступицей В, X1 равна положительной сумме ее зазора между кольцом и ступицей и высоты зуба. Когда коническая муфта полностью входит в зацепление со ступицей А, X2 равна отрицательной величине зазора между ее кольцом и ступицей. Когда коническая муфта полностью сцеплена со ступицей В, X2 равна ее зазору между кольцом и ступицей.
Можно моделировать влияние теплового потока и изменения температуры с помощью дополнительного порта сохранения тепла. По умолчанию тепловой порт скрыт. Чтобы открыть тепловой порт, в разделе Настройки сцепления (Clutch settings) выберите зависящее от температуры значение параметра Модель трения (Friction model). Укажите связанные тепловые параметры для компонента.
Модель не учитывает эффекты инерции. Вы можете добавить блок Инерции Simscape™ в каждом порту, чтобы добавить инерцию к модели синхронизатора.
X1 - Перевод сцепления собакПорт вывода физического сигнала, измеряющий величину преобразования сцепления собачки.
X2 - Перемещение конической муфтыПорт вывода физического сигнала, измеряющий величину перемещения конической муфты.
HA - Ступица сцепления AМеханическое отверстие для сохранения вращения, связанное с валом ступицы А муфты.
HB - Ступица сцепления BМеханическое отверстие для сохранения вращения, связанное с валом В ступицы сцепления.
R - Кольцо сцепленияМЕХАНИЧЕСКОЕ ПОВОРОТНОЕ ЗАЩИТНОЕ ОТВЕРСТИЕ, СВЯЗАННОЕ С КОЛЬЦОМ СЦЕПЛЕНИЯ.
S - Сменная связьМЕХАНИЧЕСКОЕ ПОВОРОТНОЕ КОНСЕРВИРУЮЩЕЕ ОТВЕРСТИЕ, СВЯЗАННОЕ СО СДВИГАЮЩЕЙ СВЯЗЬЮ.
T - Тепловой потокТермосберегающий порт, связанный с тепловым потоком.
Этот порт отображается, только если в настройках трения для параметра Модель трения (Friction model) задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
В таблице показано, как указанные опции параметров в настройках «Коническое сцепление» и «Собачье сцепление» влияют на видимость:
Параметры в настройках «Коническая муфта», «Собачья муфта» и «Начальные условия»
Параметры теплового порта
Тепловой порт T
Сведения о прочтении таблицы см. в разделе Зависимости параметров.
Зависимости параметров двухстороннего блока синхронизатора
| Настройки | Параметры и опции | |||||
|---|---|---|---|---|---|---|
| Коническая муфта | Максимальный диаметр контактной поверхности | |||||
| Минимальный диаметр контактной поверхности | ||||||
| Угол половины конуса | ||||||
| Модель трения | ||||||
Fixed kinetic friction coefficient | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficients | |||
| - | - | Открывает:
| Открывает:
| |||
| - | Вектор относительной скорости | Вектор относительной скорости | ||||
| - | - | Температурный вектор | Температурный вектор | |||
| Коэффициент статического трения | Вектор коэффициента статического трения | Вектор коэффициента статического трения | Матрица коэффициента статического трения | |||
| Коэффициент кинетического трения | Вектор коэффициента кинетического трения | Вектор коэффициента кинетического трения | Матрица коэффициента кинетического трения | |||
| - | Метод интерполяции коэффициента трения | Метод интерполяции коэффициента трения | Метод интерполяции коэффициента трения | |||
| - | Метод экстраполяции коэффициента трения | Метод экстраполяции коэффициента трения | Экстраполяция коэффициента трения | |||
| Допуск скорости | Допуск скорости | Допуск скорости | Допуск скорости | |||
| Пороговое усилие | Пороговое усилие | Пороговое усилие | Пороговое усилие | |||
| Собачья кладка | Модель передачи крутящего момента | Модель передачи крутящего момента | - | - | ||
Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | - | - | |
| - | - | - | - | Температурный вектор | Температурный вектор | |
| Максимальный передаваемый крутящий момент | - | Максимальный передаваемый крутящий момент | - | Вектор максимального передаваемого крутящего момента | Вектор максимального передаваемого крутящего момента | |
| - | - | - | - | Метод интерполяции | Метод интерполяции | |
| - | - | - | - | Метод экстраполяции | Метод экстраполяции | |
| Средний радиус зубьев сцепления | Средний радиус зубьев сцепления | Средний радиус зубьев сцепления | Средний радиус зубьев сцепления | Средний радиус зубьев сцепления | Средний радиус зубьев сцепления | |
| - | Количество зубьев | - | Количество зубьев | |||
| Вращательный люфт | Вращательный люфт | |||||
| - | Жесткость на кручение | - | Жесткость на кручение | |||
| - | Торсионное демпфирование | - | Торсионное демпфирование | |||
| - | Коэффициент трения между зубами | - | Коэффициент трения между зубами | |||
| Начальные условия | Начальное состояние | Начальное состояние | Начальное состояние | Начальное состояние | Начальное состояние | Начальное состояние |
| Исходное положение переключения сцепления собачьей муфты | Исходное положение переключения сцепления собачьей муфты | Исходное положение переключения сцепления собачьей муфты | Исходное положение переключения сцепления собачьей муфты | Исходное положение переключения сцепления собачьей муфты | Исходное положение переключения сцепления собачьей муфты | |
| Исходное положение звена сцепления конической муфты | Исходное положение звена сцепления конической муфты | Исходное положение звена сцепления конической муфты | Исходное положение звена сцепления конической муфты | Исходное положение звена сцепления конической муфты | Исходное положение звена сцепления конической муфты | |
| - | Начальный угол смещения муфты A кольца-ступицы | - | Начальный угол смещения муфты A кольца-ступицы | - | - | |
| - | Начальный угол смещения кольцевой муфты В-ступицы | - | Начальный угол смещения кольцевой муфты В-ступицы | - | - | |
| Тепловой порт | - | - | - | - | Тепловая масса | Тепловая масса |
| - | - | - | - | Начальная температура | Начальная температура | |
Contact surface maximum diameter - Наружный диаметр150
mm (по умолчанию) | положительный скалярНаружный конический диаметр do.
Contact surface minimum diameter - Внутренний диаметр100
mm (по умолчанию) | положительный скалярВнутренний конический диаметр ди.
Cone half angle - Угол половины конуса12
deg (по умолчанию) | положительный скалярПоловинный угол открытия α геометрии конуса.
Friction model - Модель тренияFixed kinetic friction coefficient (по умолчанию) | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficientsМетод параметризации для моделирования коэффициента кинетического трения. Опции и значения по умолчанию для этого параметра зависят от модели трения, выбранной для блока. Возможны следующие варианты:
Fixed kinetic friction coefficient - указать фиксированное значение коэффициента кинетического трения.
Velocity-dependent kinetic friction coefficient - Определить коэффициент кинетического трения путем одномерного просмотра таблицы на основе относительной угловой скорости между дисками.
Temperature-dependent friction coefficients - Определить коэффициент кинетического трения путем просмотра таблицы на основе температуры.
Temperature and velocity-dependent friction coefficients - Определение коэффициента кинетического трения путем просмотра таблицы на основе температуры и относительной угловой скорости между дисками.
Настройка модели трения влияет на видимость других параметров, настроек и портов.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Relative velocity vector - Относительная скорость[0, 100, 1000]
rad/s (по умолчанию) | векторВходные значения относительной скорости в виде вектора. Значения в векторе должны увеличиваться слева направо. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции укажите не менее двух значений на размер. Для гладкой интерполяции укажите не менее трех значений для каждого размера.
Этот параметр отображается, только если для параметра модели трения задано значение Velocity-dependent kinetic friction coefficient или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Temperature vector - Температура[280, 300, 320]
K (по умолчанию) | увеличение вектораВходные значения температуры в виде вектора. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции укажите не менее двух значений на размер. Для гладкой интерполяции укажите не менее трех значений для каждого размера. Значения в векторе должны увеличиваться слева направо.
Этот параметр отображается, только если для параметра модели трения задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Static friction coefficient - Коэффициент статического трения0.35 (по умолчанию) | скалярСтатическое или пиковое значение коэффициента трения. Коэффициент статического трения должен быть больше коэффициента кинетического трения.
этот параметр виден, только если для параметра модели трения установлено значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Static friction coefficient vector - Коэффициент статического трения[.4, .38, .36] (по умолчанию) | векторСтатические или пиковые значения коэффициента трения как вектора. Вектор должен иметь то же количество элементов, что и вектор температуры. Каждое значение должно быть больше значения соответствующего элемента в векторе коэффициента кинетического трения.
Этот параметр отображается, только если для параметра модели трения задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Kinetic friction coefficient - Коэффициент кинетического трения0.3 (по умолчанию) | позиционный скалярКинетический коэффициент трения Кулона. Коэффициент должен быть больше нуля.
Этот параметр отображается, только если для параметра модели трения задано значение Fixed kinetic friction coefficient.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Kinetic friction coefficient vector - Коэффициент кинетического трения[.3, .22, .19] (по умолчанию) | [.3, .28, .25] | векторВыходные значения коэффициента кинетического трения в виде вектора. Все значения должны быть больше нуля.
Если для параметра Модель трения (Friction model) задано значение
Velocity-dependent kinetic friction coefficient - Вектор должен иметь то же количество элементов, что и вектор относительной скорости.
Temperature-dependent friction coefficients - Вектор должен иметь то же количество элементов, что и вектор температуры.
Этот параметр отображается, только если для параметра модели трения задано значение Velocity-dependent kinetic friction coefficient или Temperature-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Kinetic friction coefficient matrix - Коэффициент кинетического трения[.34, .32, .3; .3, .28, .25; .25, .2, .15] (по умолчанию) | матрицаВыходные значения коэффициента кинетического трения в виде матрицы. Все значения должны быть больше нуля. Размер матрицы должен быть равен размеру матрицы, которая является результатом вектора температуры × вектора относительной скорости коэффициента кинетического трения.
Этот параметр отображается, только если для параметра модели трения задано значение Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Friction coefficient interpolation method - Метод интерполяцииLinear (по умолчанию) | SmoothМетод интерполяции для аппроксимации выходного значения, когда входное значение находится между двумя последовательными точками сетки:
Linear - Выберите этот параметр, чтобы получить наилучшую производительность.
Smooth - выберите эту опцию, чтобы создать непрерывную кривую с непрерывными производными первого порядка.
Дополнительные сведения о алгоритмах интерполяции см. на странице ссылок на блоки таблицы поиска PS (1D).
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Friction coefficient extrapolation method - Метод экстраполяцииLinear (по умолчанию) | Nearest | ErrorМетод экстраполяции для определения выходного значения, когда входное значение выходит за пределы диапазона, указанного в списке аргументов:
Linear - выберите эту опцию для создания кривой с непрерывными производными первого порядка в области экстраполяции и на границе с областью интерполяции.
Nearest - выберите эту опцию, чтобы создать экстраполяцию, которая не превышает самую высокую точку в данных или ниже самой низкой точки в данных.
Error - выберите эту опцию, чтобы избежать перехода в режим экстраполяции, если требуется, чтобы данные находились в пределах табличного диапазона. Если входной сигнал находится вне диапазона таблицы, моделирование останавливается и генерирует ошибку.
Дополнительные сведения о алгоритмах экстраполяции см. на странице ссылок на блоки таблицы поиска PS (1D).
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Velocity tolerance - Порог блокировки относительной скорости0.001
rad/s (по умолчанию) | скалярОтносительная скорость, ниже которой могут быть зафиксированы две поверхности. Поверхности блокируются, если крутящий момент меньше произведения эффективного радиуса, коэффициента статического трения и приложенной нормальной силы.
Threshold force - Порог нормальной контактной силы1
N (по умолчанию) | скалярНормальная сила применяется только в том случае, если величина силы превышает значение параметра Пороговое усилие (Threshold force). Силы ниже порогового усилия не прикладываются, поэтому отсутствует передаваемый фрикционный крутящий момент.
Методы, доступные для параметризации передачи крутящего момента, зависят от того, зависит ли модель трения от температуры.
Модель трения определяется в настройках Конической муфты (Cone Clutch) настройкой параметра Модель трения (Friction model):
Fixed kinetic friction coefficient - Независимо от температуры
Velocity-dependent kinetic friction coefficient - Независимо от температуры
Temperature-dependent friction coefficients - Зависит от температуры
Temperature and velocity-dependent friction coefficients - Зависит от температуры
Для модели, не зависящей от температуры, параметризуйте блок с помощью одной из опций параметра «Модель передачи крутящего момента».
Torque transmission model - Модель передачи крутящего моментаFriction clutch approximation — Suitable for HIL and linearization (по умолчанию) | Dynamic with backlashВычислительная основа для моделирования динамического поведения собачьего сцепления:
Friction clutch approximation — Suitable for HIL and linearization - Моделирует сцепление муфты как явление трения между кольцом и ступицей. Эта модель, основанная на блоке Fundamental Friction Clutch, обеспечивает вычислительную эффективную аппроксимацию сцепления собачки.
Dynamic with backlash - Детальное моделирование зацепления муфты с учетом таких явлений, как люфт, скручивание и контактные усилия между зубьями кольца и ступицы.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent friction coefficients.
На видимость связанных параметров в настройках Сцепление с собакой (Dog Clutch) и Начальные условия (Initial Conditions) влияет опция, выбранная для этого параметра.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Temperature vector - Температура[280, 300, 320]
K (по умолчанию) | увеличение вектораВходные значения температуры в виде вектора. Минимальное количество значений зависит от выбранного метода интерполяции. Для линейной интерполяции укажите не менее двух значений на размер. Для гладкой интерполяции укажите не менее трех значений для каждого размера. Значения в векторе должны увеличиваться слева направо.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Maximum transmitted torque - Максимальный передаваемый крутящий момент1000
N*m (по умолчанию) | положительный скалярНаибольший крутящий момент, который может передавать муфта, что соответствует конфигурации без скольжения. Если крутящий момент, передаваемый между кольцом и ступицей, превышает это значение, два компонента начинают скользить относительно друг друга. Этот крутящий момент определяет предел статического трения в приближении фрикционной муфты
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Friction clutch approximation - Suitable for HIL and linearization.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Maximum transmitted torque vector - Максимальный передаваемый крутящий момент[1000, 1050, 1000]
N*m (по умолчанию) | векторНаибольший крутящий момент, который может передать муфта, соответствующий конфигурации без скольжения, заданной как вектор. Если крутящий момент, передаваемый между кольцом и ступицей, превышает это значение, два компонента начинают скользить относительно друг друга. Этот крутящий момент определяет предел статического трения в приближении фрикционной муфты. Вектор имеет то же количество элементов, что и вектор температуры.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Interpolation method - Метод интерполяцииLinear (по умолчанию) | SmoothМетод интерполяции для аппроксимации выходного значения, когда входное значение находится между двумя последовательными точками сетки:
Linear - Выберите этот параметр, чтобы получить наилучшую производительность.
Smooth - выберите эту опцию, чтобы создать непрерывную кривую с непрерывными производными первого порядка.
Дополнительные сведения о алгоритмах интерполяции см. на странице ссылок на блоки таблицы поиска PS (1D).
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Extrapolation method - Метод экстраполяцииLinear (по умолчанию) | Nearest | ErrorМетод экстраполяции для определения выходного значения, когда входное значение выходит за пределы диапазона, указанного в списке аргументов:
Linear - выберите эту опцию для создания кривой с непрерывными производными первого порядка в области экстраполяции и на границе с областью интерполяции.
Nearest - выберите эту опцию, чтобы создать экстраполяцию, которая не превышает самую высокую точку в данных или ниже самой низкой точки в данных.
Error - выберите эту опцию, чтобы избежать перехода в режим экстраполяции, если требуется, чтобы данные находились в пределах табличного диапазона. Если входной сигнал находится вне диапазона таблицы, моделирование останавливается и генерирует ошибку.
Дополнительные сведения о алгоритмах экстраполяции см. на странице ссылок на блоки таблицы поиска PS (1D).
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Clutch teeth mean radius - Средний радиус зубьев муфты50
mm (по умолчанию) | положительный скалярРасстояние от центра кольца или ступицы до соответствующего центра зуба. Средний радиус зубьев определяет нормальные контактные силы между зубьями кольца и ступицы, учитывая момент передачи между двумя компонентами. Значение должно быть больше нуля.
Number of teeth - Количество зубьев кольца или ступицы6 (по умолчанию) | положительное ненулевое скалярное целоеОбщее количество зубьев в кольце или ступице. Два компонента имеют одинаковые числа зубьев. Значение должно быть больше или равно единице.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Dynamic with backlash.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Rotational backlash - Вращательный люфт10
deg (по умолчанию) | положительный скалярДопустимое угловое движение или люфт между зубьями кольца и ступицы в конфигурации сцепления. Значение должно быть больше нуля.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Dynamic with backlash.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Torsional stiffness - Жесткость на кручение10e6
N*m/rad (по умолчанию) | положительный скалярЛинейный коэффициент крутильной жесткости на контактной поверхности между зубьями кольца и ступицы. Этот коэффициент характеризует восстанавливающую составляющую контактного усилия между двумя наборами зубьев. Большие значения жесткости соответствуют большим контактным силам. Значение должно быть больше нуля. Значение по умолчанию: 10e6
N*m/rad.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Dynamic with backlash.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Torsional damping - Крутильное демпфирование100
N*m/(rad/s) (по умолчанию) | положительный скалярКоэффициент линейного крутильного демпфирования на контактной поверхности между зубьями кольца и ступицы. Этот коэффициент характеризует диссипативную составляющую контактной силы между двумя наборами зубьев. Большие величины демпфирования соответствуют большему рассеянию энергии при контакте. Значение должно быть больше нуля.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Dynamic with backlash.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Tooth-tooth friction coefficient - Коэффициент кинетического трения зубного контакта0.05 (по умолчанию) | положительный скалярКоэффициент кинетического трения на контактной границе между зубьями кольца и ступицы. Этот коэффициент характеризует рассеивающую силу, которая противодействует смещающему движению связи из-за контакта зуба с зубом во время зацепления/расцепления муфты.
Большие значения коэффициентов соответствуют большему рассеянию энергии при движении звена сдвига. Значение должно быть больше нуля.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch для параметра Torque transmission model установлено значение Dynamic with backlash.
Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Peak force - Пиковое усилие сдвига500
N (по умолчанию) | неотрицательный скалярПиковая сила сдвига фиксатора.
Notch width - Ширина выреза3
mm (по умолчанию) | неотрицательный скалярШирина области, где фиксатор проявляет силу сдвига.
Viscous friction coefficient - Коэффициент вязкого трения0.1
N/(m/s) (по умолчанию) | неотрицательный скалярКоэффициент вязкого трения на контактной поверхности фиксатора. Значение должно быть больше или равно нулю.
Friction to peak force ratio - Отношение силы трения к пиковой силе0.01 (по умолчанию) | неотрицательный скалярОтношение кинетического трения к пиковой силе сдвига фиксатора. Параметр используется для установки значения кинетического трения. Параметр должен быть больше или равен нулю.
Friction velocity threshold - Порог скорости кинетического трения0.05
m/s (по умолчанию)Скорость, необходимая для максимального кинетического трения на контактной поверхности фиксатора. Параметр гарантирует непрерывность усилия при изменении направления движения, повышая численную устойчивость моделирования. Параметр должен быть больше нуля. Значение по умолчанию: 0.05
m/s.
Maximum engagement speed - Верхний порог скорости зацепленияinf (по умолчанию) | положительный скалярОтносительная угловая скорость между кольцом и ступицей, выше которой муфта не может зацепляться. Значение зависит от конкретной коробки передач или трансмиссии. Минимизация значения помогает избежать высоких динамических воздействий во время зацепления. Значение должно быть больше нуля.
Tooth overlap to engage - Порог зацепления при перекрытии зубьев3
mm (по умолчанию) | положительный скалярДлина перекрытия между зубьями кольца и ступицы вдоль общей продольной оси, над которой может зацепляться муфта. Муфта остается в нерабочем состоянии до тех пор, пока зубец не перекрывается, по меньшей мере, на эту длину. Значение должно быть больше нуля.
Tooth height - Высота зуба10
mm (по умолчанию) | положительный скалярРасстояние между основанием и гребнем зуба. Зубья кольца и ступицы имеют одинаковую высоту. Высота зуба и зазор между кольцом и ступицей при полном расцеплении определяют максимальный диапазон перемещения переключающего звена. Значение должно быть больше нуля.
Ring-hub clearance when disengaged - Зазор между кольцом и ступицей при отключении3
mm (по умолчанию) | положительный скалярМаксимальный открытый зазор между гребнями зубьев кольца и ступицы вдоль оси перемещения передаточного звена. Этот зазор соответствует полностью отключенному состоянию сцепления. Высота зуба и зазор между кольцом и ступицей при полном расцеплении определяют максимальный диапазон перемещения переключающего звена. Значение должно быть больше нуля.
Hard stop at back of shift linkage - Модель жесткой остановкиOn (по умолчанию) | OffЖесткая остановка, препятствующая выходу звена переключения передач за пределы полностью расцепленного положения:
On - Жесткая остановка при полном расцеплении.
Off - Нет жесткой остановки при полном расцеплении.
Dog clutch ring stop stiffness - Жесткость упора кольца сцепления собачьего10e5
N/m (по умолчанию) | положительный скалярЖесткость жестких упоров по обе стороны кольца сцепления собаки. Модель предполагает, что кольцо и стопоры ведут себя упруго. Контактная деформация пропорциональна приложенной силе и возвратно-поступательному воздействию контактной жесткости. Значение жесткости должно быть задано со ссылкой на параметр Перекрытие зуба для зацепления. Слишком низкая жесткость может привести к тому, что деформация превысит требуемое перекрытие и приведет к ложному зацеплению. Параметр должен быть больше нуля.
Cone clutch ring stop stiffness - Жесткость упора кольца конической муфты10e5
N/m (по умолчанию) | положительный скалярЖесткость жестких упоров с обеих сторон кольца конического сцепления. Модель предполагает, что кольцо и стопоры ведут себя упруго. Контактная деформация пропорциональна приложенной силе и возвратно-поступательному воздействию контактной жесткости.
Dog clutch ring stop damping - Демпфирование кольца сцепления собачьего1e3
N/(m/s) (по умолчанию) | неотрицательный скалярЗатухание поступательного контакта между кольцом сцепления собачки и ступицей. Величина демпфирования обратно пропорциональна числу колебаний, возникающих после удара. Параметр должен быть больше нуля.
Cone clutch ring stop damping - Демпфирование упора кольца конической муфты1e3
N/(m/s) (по умолчанию) | неотрицательный скалярЗатухание поступательного контакта между кольцом конической муфты и ступицей. Величина демпфирования обратно пропорциональна числу колебаний, возникающих после удара. Параметр должен быть больше нуля.
Shift linkage viscous friction coefficient - Коэффициент вязкого трения связи сдвига100
N/(m/s) (по умолчанию) | положительный скалярКоэффициент вязкого трения для относительного поступательного движения между ступицей и кольцом. Значение параметра зависит от состояния смазки и качества контактирующих поверхностей. Коэффициент должен быть больше или равен нулю.
Initial state - Исходное состояние сцепленияAll clutches unlocked (по умолчанию) | Cone clutch A and dog clutch A locked | Cone clutch A locked | Cone clutch B locked | Cone clutch B and dog clutch B lockedНачальная конфигурация конических и собачьих сцеплений:
Cone clutch A and dog clutch A locked - Коническая муфта А и собачья муфта А передают крутящий момент между валами кольца и ступицы.
Cone clutch A locked - коническая муфта А передает крутящий момент между валами кольца и ступицы.
All clutches unlocked- Конические и собачьи муфты передают нулевой крутящий момент между кольцевым и ступичным валами.
Cone clutch B locked - коническая муфта В передает крутящий момент между валами кольца и ступицы.
Cone clutch B and dog clutch B locked - Коническая муфта B и собачья муфта B передают крутящий момент между валами кольца и ступицы.
Dog clutch initial shift linkage position - Исходное положение переключения сцепления собачьей муфты0
mm (по умолчанию) | скалярИсходное положение секции переключения передач, которая крепится к муфте собачьей. Значение параметра имеет следующие ограничения:
| Состояние сцепления собак | Ограничение параметров |
|---|---|
| Собака сцепление A Первоначально задействовано | Отрицательное значение параметра должно быть больше суммы параметров Зазор кольца-ступицы при отключении сцепления собачки и перекрытии зуба для зацепления |
| Сцепление с собакой A Первоначально отключено | Отрицательное значение параметра должно быть меньше суммы параметров Зазор кольца-ступицы при отключении сцепления собачки и перекрытии зуба для зацепления |
| Собака сцепление B Первоначально задействовано | Значение параметра должно быть больше суммы параметров Зазор кольца-ступицы при расцеплении собачьей муфты и перекрытии зуба для зацепления |
| Сцепление с собакой B Первоначально отключено | Значение параметра должно быть меньше суммы параметров Зазор кольца-ступицы при расцеплении собачьей муфты и перекрытии зуба для зацепления |
Cone clutch initial shift linkage position - Исходное положение переключения сцепления конической муфты0
mm (по умолчанию) | скалярИсходное положение секции переключения передач, которая крепится к конической муфте. Значение параметра имеет следующие ограничения:
| Состояние конической муфты | Ограничение параметров |
|---|---|
| Коническая муфта A первоначально включена | Минус параметра должен быть больше величины зазора Кольцо-ступица при расцеплении конической муфты |
| Коническая муфта A первоначально выведена из зацепления | Минус параметра должен быть меньше величины зазора Кольцо-ступица при расцеплении конической муфты |
| Коническая муфта B первоначально включена | Параметр должен быть больше значения зазора Кольцо-ступица при расцеплении конической муфты |
| Коническая муфта B первоначально выведена из зацепления | Параметр должен быть меньше значения зазора Кольцо-ступица при расцеплении конической муфты |
Initial dog clutch A ring-hub offset angle - Начальный угол смещения кольцевой муфты В-ступицы0
deg (по умолчанию) | скалярУгол поворота между кольцом и ступицей собачьей муфты В в момент времени моделирования ноль. Этот угол определяет, могут ли зубья кольца и ступицы блокироваться, и, следовательно, может ли муфта зацепляться. Начальный угол смещения должен удовлетворять следующим условиям:
Если исходное состояние муфты выведено из зацепления, начальный угол смещения должен быть в диапазоне
где N - количество зубьев, присутствующих в кольце или ступице. Два компонента содержат одинаковое количество зубов.
Если исходное состояние муфты включено, начальный угол смещения должен быть в диапазоне
где δ - угол зазора между зубьями кольца и ступицы.
Этот параметр отображается только при выполнении обоих условий:
В настройках конического сцепления для параметра Модель трения (Friction model) установлено значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
В настройках Dog Clutch для модели передачи крутящего момента установлено значение Dynamic with backlash.
Initial dog clutch B ring-hub offset angle - Начальный угол смещения муфты A кольца-ступицы0
deg (по умолчанию) | скалярУгол поворота между кольцом и ступицей в нулевое время моделирования. Этот угол определяет, могут ли зубья кольца и ступицы блокироваться, и, следовательно, может ли муфта зацепляться. Начальный угол смещения должен удовлетворять следующим условиям:
Если исходное состояние муфты выведено из зацепления, начальный угол смещения должен быть в диапазоне
где N - количество зубьев, присутствующих в кольце или ступице. Два компонента содержат одинаковое количество зубов.
Если исходное состояние муфты включено, начальный угол смещения должен быть в диапазоне
где δ - угол зазора между зубьями кольца и ступицы.
Этот параметр отображается только при выполнении обоих условий:
В настройках конического сцепления для параметра Модель трения (Friction model) установлено значение Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
В настройках Dog Clutch для модели передачи крутящего момента установлено значение Dynamic with backlash.
Настройки теплового порта (Thermal Port) видны, только если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Thermal mass - Тепловая масса50
kJ/K (по умолчанию) | скалярТепловая энергия, необходимая для изменения температуры компонента на один градус. Чем больше тепловая масса, тем больше устойчивость компонента к изменению температуры.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Initial temperature - Начальная температура300
K (по умолчанию) | скалярТемпература компонента в начале моделирования. Начальная температура изменяет эффективность компонента в соответствии с заданным вектором эффективности, влияя на начальную сетку или потери на трение.
Этот параметр отображается только в том случае, если в настройках конического сцепления для параметра Модель трения (Friction model) задано значение Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Дополнительные сведения см. в разделе Двухсторонние зависимости параметров блока синхронизатора.
Эти тепловые параметры видны только при выборе зависящей от температуры модели трения.
Тепловая энергия, необходимая для изменения температуры компонента на один градус. Чем больше тепловая масса, тем больше устойчивость компонента к изменению температуры. Значение по умолчанию: 100 kJ/K.
Температура компонента в начале моделирования. Начальная температура изменяет эффективность компонента в соответствии с заданным вектором эффективности, влияя на начальную сетку или потери на трение. Значение по умолчанию: 300 K.
Чтобы оптимизировать модель для линеаризации, используйте параметр по умолчанию Dog Clutch > Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
Для обеспечения оптимальной производительности моделирования используйте параметр по умолчанию Dog Clutch > Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
