Определение степеней свободы вращения (DoF) важно для построения и анализа трансмиссии, особенно сложной системы со многими ограничениями и внешними включениями. Simulink ® представляет DoF трансмиссии и другие Simscape™ системные переменные как состояния среди всех состояний модели, включая чистые состояния Simulink.
В этом разделе объясняется, как идентифицировать DoF трансмиссии, обрабатывать ограничения и извлекать истинные или независимые DoF из полной схемы трансмиссии.
Основные элементы схемы трансмиссии:
Соединительные линии
Ограничения, включая ответвления
Динамические элементы
Датчики и источники
Исполнительные приводы с источниками движения и регистрирующие движения с датчиками движения
Завершение DoF
В модели Simscape Driveline™ механические движения могут быть вращательными или поступательными: движение вокруг или вдоль одной оси. Простейший способ определения степени свободы трансмиссии (DoF) - от угловой или линейной скорости. DoF представляет единственную, отличную угловую или линейную скорость. Каждый DoF реагирует на крутящие моменты и силы, действующие на инерции и массы, составляющие трансмиссию. Интегрирование уравнений движения Ньютона определяет угловое и линейное движения. Механические DoF - это свойства вращающихся инерций и перемещающихся масс. Тем не менее, идентификацию одной трансмиссии Simscape DoF в качестве оси трансмиссии с присоединенными инерциями и массами является более последовательной и простой.
Чтобы идентифицировать и подсчитать DoF в трансмиссии, просмотрите схему трансмиссии Simscape, начиная с ее механических соединительных линий, прежде чем рассматривать ее блоки. Блоки приводов изменяют DoF, представленные соединительными линиями:
Создание крутящих моментов и сил, которые действуют относительно между осями трансмиссии
Добавление зависимостей между осями трансмиссии
Наложение внешних крутящих моментов, сил и движений
Основные правила подключения линий и портов см. в разделе Создание модели Drivetrain.
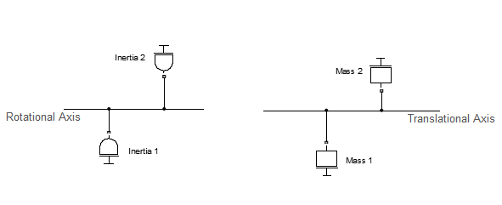
Основной единицей движения трансмиссии является DoF, представленный неразрывной механической соединительной линией. Такие линии представляют собой идеализированные безмассовые и идеально жесткие оси трансмиссии.
В виде блоков инерции вращающиеся тела с инерциями жестко прикреплены и вращаются своими осями. В виде блоков формообразующих элементов поступательные тела с массами жестко прикреплены к их осям и перемещаются вдоль них. Одна соединительная линия или набор разветвленных соединительных линий представляет собой вращательное или поступательное движение и должны быть соединены с вращательными или поступательными портами.
Соединительная линия, закрепленная портами физических сетевых соединителей![]() , представляет собой идеализированную ось трансмиссии. Соединительная линия обеспечивает ограничение, заключающееся в том, что два соединенных компонента трансмиссии вращаются или перемещаются с одинаковой угловой или линейной скоростью соответственно.
, представляет собой идеализированную ось трансмиссии. Соединительная линия обеспечивает ограничение, заключающееся в том, что два соединенных компонента трансмиссии вращаются или перемещаются с одинаковой угловой или линейной скоростью соответственно.
![]()
Угловая или линейная скорость оси измеряется с помощью блока «Датчик идеального вращательного движения» или «Датчик идеального поступательного движения».
Определение относительных и абсолютных углов и положений. Относительный угол или положение иногда требуется для вычисления внутренних моментов или сил между парами осей (см. Определение связанных степеней свободы). Для определения относительного угла или положения блок датчика движения интегрирует относительную угловую или линейную скорость пары осей и добавляет результат к начальному относительному углу или положению, заданному в диалоговом окне блока.
Можно определить абсолютный угол поворота или положение перемещения для одной оси при измерении ее движения с помощью датчика движения, соединяя другой порт физического соединения датчика с механической вращательной привязкой или механической поступательной привязкой. Датчик определяет абсолютный угол или положение, интегрируя скорость оси и добавляя абсолютный опорный угол или положение, указанное в диалоговом окне датчика движения.
Невозможно подвергнуть линию соединения трансмиссии каким-либо крутящим моментам или силам, поскольку ей не хватает инерции или массы. Другим базовым элементом для построения функционирующей модели трансмиссии является один или несколько блоков инерции, один или несколько блоков формообразующих элементов или оба. В реальной механической системе вращающиеся (или скользящие) тела несут как инерцию (или массу), так и DoF.
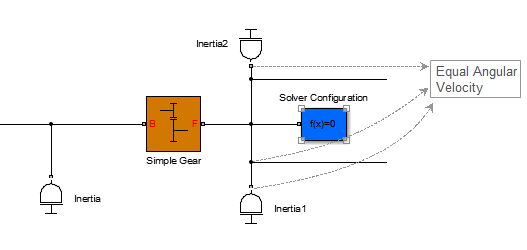
Инерции и массы присоединяются к линиям механического соединения путем разветвления линий. Присоединенные инерции или массы подвергаются воздействию любого крутящего момента или усилия, передаваемого соединительной линией. Соединительная линия накладывает ограничение на то, что все присоединенные к одной линии должны вращаться или скользить с одинаковой скоростью.
Можно ответвлять соединительные линии. Можно подключить конец любой ветви линии передачи только к порту механической экономии![]() . Набор неразрывных разветвленных соединительных линий представляет один DoF.
. Набор неразрывных разветвленных соединительных линий представляет один DoF.
Разветвленные соединительные линии и ограничения угловой скорости
Две независимые оси трансмиссии, представляющие две независимые степени свободы (DoF), можно соединить с помощью внутреннего динамического элемента. Динамический элемент создает крутящий момент или силу из относительного угла, положения или движения двух осей. Этот крутящий момент или сила действуют между двумя осями, которые остаются независимыми от DoF и которые передают крутящий момент или силу своим соответствующим присоединенным инерциям или массам.
Помимо зубчатых колес, большинство блоков библиотеки приводов Simscape являются динамическими элементами, а также механическими вращательными и поступательными блоками библиотеки Simscape Foundation. Эти блоки генерируют внутренние крутящие моменты и силы. На блоке с двумя механическими консервационными окнами один крутящий момент или усилие прикладывается с положительным знаком к одной оси и отрицательным знаком к другой оси. На этом рисунке крутящий момент приложен одинаково и противоположно к осям штока и корпуса пружинного демпфера кручения.
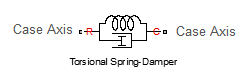
На блоках с более чем двумя механическими консервационными окнами суммарные крутящие моменты или силы, протекающие внутрь и наружу блока, по-прежнему равны нулю, но крутящий момент или сила разделяются между окнами более сложным образом, который зависит от динамики трансмиссии.
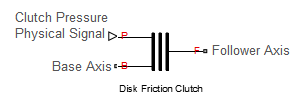
Сцепление или подобный сцеплению элемент является условным или динамическим ограничением.
При разблокировании муфта соединяет две оси трансмиссии и может создавать относительный крутящий момент между ними, оставляя две оси независимыми. Незафиксированная муфта либо не находится в зацеплении, не создавая крутящего момента; или вводят в зацепление, создавая кинетическое трение как функцию относительной скорости двух соединенных осей.
Если муфта блокируется и применяет только статическое трение между двумя соединенными осями, две оси больше не являются независимыми. Вместо этого они действуют как одна ось, вращаясь с одинаковой скоростью. См. раздел Определение зависимых степеней свободы.
Некоторые другие, похожие на сцепление блоки также имеют блокирующее и разблокирующее кулоновское трение:
Некоторые элементы трансмиссии соединяют оси трансмиссии таким образом, чтобы исключить возможность их независимого перемещения. Такие элементы накладывают ограничения на движения соединенных осей. Ось, на которую наложены зависимости, больше не зависит от других осей и не учитывается в направлении общей сетки или независимых движений трансмиссии. Такие ограничения удаляют независимые степени свободы (DoF) из системы.
Не все ограничения независимы. Замыкание разветвленных соединительных линий на контуры делает некоторые ограничения внутри контуров избыточными. Число действующих или независимых зависимостей - это количество зависимостей, возникающих из блоков минус количество независимых замкнутых контуров линий соединения трансмиссии.
За исключением муфт сцепления и элементов, подобных муфте сцепления, ограничения трансмиссии являются безусловными или статическими ограничениями; то есть неизменность над моделированием.
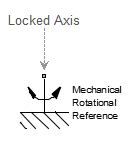
Соединение линии соединения трансмиссии с блоком механической привязки вращения или механической поступательной привязки замораживает движение соответствующей оси трансмиссии. Он не может перемещаться, и его угловая или линейная скорость ограничена нулем во время моделирования. Такая ось не имеет связанных независимых степеней свободы.
До тех пор, пока условия блокировки являются действительными, запертая муфта или подобный муфте элемент удерживает две соединенные оси трансмиссии для вращения или скольжения вместе. Две оси остаются различными, но только одна представляет независимую степень свободы. Другой зависит.
Даже если он продолжает прикладывать кинетическое трение между осями, разблокированная муфта или элемент, подобный муфте, больше не накладывает ограничения. Вместо этого он действует как динамический элемент. См. раздел Определение связанных степеней свободы.
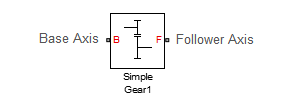
Зубчатое соединение между двумя или более осями трансмиссии уменьшает независимые DoF трансмиссии за счет наложения ограничений. Характер этих ограничений зависит от используемого зубчатого колеса. Зубчатые блоки с двумя соединенными осями накладывают одно такое ограничение и уменьшают две оси до одного независимого DoF.
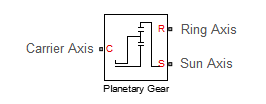
Многоосные шестерни накладывают несколько ограничений. Например, планетарная передача накладывает два ограничения на три оси, уменьшая оси до одной независимой степени свободы. (Этот подсчет не включает в себя четвёртый, внутренний DoF, планетарный круг, который не соединен с осью с механическим портом.)
Фактическое число ограничений для определения числа степеней свободы - это число эффективных или независимых ограничений. Когда соединительные линии образуют замкнутые петли, следует соблюдать дополнительную осторожность при подсчете ограничений на схеме трансмиссии. Наличие замкнутых контуров на диаграмме уменьшает число эффективных ограничений, делая некоторые из ограничений избыточными:
Nconstr = Nbconstr - Nloop
| Нконштрассе | Количество независимых ограничений |
| Нбконштрассе | Количество зависимостей из блоков |
| Nloop | Количество независимых контуров |
Количество независимых контуров можно надежно подсчитать путем подсчета основных контуров. Основные контуры не имеют субблоков. Можно проследить фундаментальный цикл только с одним путем. Подсчитывая только основные контуры, можно избежать переполнения перекрывающихся контуров.
Например, эта диаграмма имеет два независимых контура.
На этой схеме можно нарисовать три контура: два внутренних контура, левый и правый и внешний контур. Внешний контур охватывает оба внутренних контура.
На этой диаграмме есть два независимых контура, потому что фундаментальными являются только два. Внешний контур не является фундаментальным.
Согласованность ограничений. Пока все скорости, ограниченные точками ответвления линии, равны по всему контуру, замкнутый контур делает избыточным одно из ограничений, содержащихся в нем. (См. раздел Правила и ограничения ветвления оси привода.) Скорости, непосредственно не соединенные линиями, также должны быть последовательными, если, например, они передаются через шестерни.
Если скорости по замкнутому контуру не могут быть согласованы, трансмиссия чрезмерно ограничена и не может перемещаться.
Для ![]() создания или завершения физической линии соединения можно использовать привод Simscape и связанные блоки только с одним соединительным портом привода. Завершение соединительной линии ограничивает DoF.
создания или завершения физической линии соединения можно использовать привод Simscape и связанные блоки только с одним соединительным портом привода. Завершение соединительной линии ограничивает DoF.
К таким блокам относятся:
Инерция и масса, которые принимают крутящий момент и силу и реагируют с ускорением.
Опорная точка механического вращения (Mechanical Rotation Reference) и Опорная точка механического перемещения (Mechanical Translational Reference), которые заземляют DoF до нулевой скорости.
Кузов транспортного средства, который неявно соединяет трансмиссию с землей.
Эти блоки не должны заканчивать соединительную линию, но вместо этого могут быть ответвлены от соединительной линии.
Соединительные линии трансмиссии не имеют собственной направленности. Направление движения и крутящего момента определяется динамикой трансмиссии при моделировании модели.
Подключение источника идеального крутящего момента или источника идеальной силы к линии соединения трансмиссии добавляет момент или силу, заданную физическим сигналом, вводимым в эту ось трансмиссии. Такое срабатывание не влияет на количество DoF системы. Оси трансмиссии передают крутящие моменты и силы своим соединенным инерциям и массам. Трансмиссия может свободно реагировать на эти крутящие моменты или силы. Движение моделируется путем интегрирования ускорений трансмиссии (в результате приложенных крутящих моментов и сил) для получения скоростей трансмиссии.
Подключение источника идеальной угловой скорости или источника идеальной поступательной скорости к оси трансмиссии снимает свободу этой оси реагировать на крутящие моменты или силы. Вместо этого он определяет движение оси во время моделирования из входного сигнала приведения в действие. В отличие от приведения в действие крутящего момента, приведение в движение удаляет независимый DoF из системы.
Дополнительные сведения о приводе трансмиссии с крутящими моментами, силами и движениями см. в разделе Привод трансмиссии.
Чтобы определить количество независимых степеней свободы (DoF) в трансмиссии:
Подсчитайте все непрерывные неразрывные соединительные линии трансмиссии (группирование соединенных наборов разветвленных линий) в части схемы модели «Трансмиссия Simscape». Вызовите общее количество таких линий NCL.
Эти линии соединяют два порта разъема трансмиссии или заканчиваются одним портом механического разъема. ![]() Дополнительные сведения см. в разделах Определение основных степеней свободы и включение, считывание и прекращение степеней свободы.
Дополнительные сведения см. в разделах Определение основных степеней свободы и включение, считывание и прекращение степеней свободы.
Подсчитайте все зависимости, возникающие из блоков, которые накладывают зависимости на их присоединенные оси трансмиссии. Вызовите итог таких ограничений Nbconstr.
Обычно каждый такой блок накладывает одно ограничение, но сложные передачи накладывают более одного. Дополнительные сведения см. в разделе Определение зависимых степеней свободы.
Подсчитайте количество независимых циклов, Nloop. Эффективное число ограничений - Nconstr = Nbconstr - Nloop. Дополнительные сведения см. в разделах Замкнутые контуры, Эффективные ограничения и Согласованность ограничений.
Подсчитайте все движения привода, подсчитав каждый блок источника движения. Вызовите итог таких действий Nmact. Дополнительные сведения см. в разделах Включение, считывание и прекращение степеней свободы.
Количество NDoF независимых DoF в трансмиссии:
NDoF = NCL - Nconstr - Nmact = NCL - [Nbconstr - Nloop] - Nmact
Необходимым (хотя и недостаточным) условием для движения трансмиссии и успешного моделирования трансмиссии является то, что NDoF является положительным. Отсчет вращательных и поступательных DoF по отдельности.
В отличие от других компонентов трансмиссии, муфты и элементы, подобные муфте, могут подвергаться прерывистому изменению состояния во время моделирования. В целом, количество независимых DoF трансмиссии не является постоянным во время её движения. Каждое изменение состояния одного или нескольких сцеплений изменяет независимое число DoF. Взятые в целом, различные коллективные состояния сцеплений трансмиссии могут иметь разные суммарные DoF. Чтобы полностью понять трансмиссию, изучите каждое возможное коллективное состояние ее состояний сцепления, чтобы определить ее независимые DoF и, возможно, недействительные конфигурации.
Рассмотрим двухступенчатую модель трансмиссии sdl_transmission_2spd.
Простая передача
![]()
Эта система имеет пять видимых DoF, представленных этими осями трансмиссии:
Разветвленная ось с блоком «Инерционный приводной вал»
Разветвленная ось с блоком инерционного выходного вала
Ось, соединяющая блок сцепления высокой передачи (муфта для схемы сцепления высокой передачи) с блоком сцепления высокой передачи
Ось, соединяющая блок сцепления с низкой передачей (муфта для схемы сцепления с низкой передачей) с блоком сцепления с низкой передачей
Ось, соединяющая тормозной блок сцепления с опорным блоком механического вращения (вращательное заземление)
Имеется очевидная замкнутая петля, образованная зубчатыми блоками и блоками зубчатой муфты. Эта петля реальна только в том случае, если оба зубчатых блока сцепления заблокированы.
Фактическое количество независимых DoF зависит от состояния сцеплений. У модели нет источников движения, поэтому в качестве ограничений необходимо рассматривать только шестерни и муфты:
Два блока зубчатых колес всегда действуют, что дает два постоянно существующих ограничения.
Пятая ось всегда соединена с корпусом (вращательное заземление).
Эти три ограничения уменьшают пять DoF до двух DoF.
Теперь рассмотрим сцепления.
Рассмотрим сначала случай, когда тормозная колодка сцепления отключена (свободна).
Если разблокированы как высоко-, так и низкоприводные блоки сцепления, система имеет два независимых DoF, один слева от блоков сцепления, а другой между блоками сцепления и блоком торможения сцепления.
Если один из этих блоков переключения передач заблокирован, дополнительное ограничение уменьшает систему до одного независимого DoF, все слева от блока торможения сцепления. (График управления сцеплением настроен, чтобы предотвратить одновременную блокировку обоих этих блоков сцепления.)
Если включен тормозной блок сцепления, то в графике управления сцеплением два зубчатых блока сцепления отключены.
Если блок тормоза сцепления разблокирован, трансмиссия имеет два независимых DoF: слева от блоков сцепления передач и между блоками сцепления передач и блоком тормоза сцепления.
Если тормозной блок сцепления заблокирован, система уменьшается до одного DoF слева от зубчатых блоков сцепления. Все, что справа от блоков сцепления передач, зафиксировано на корпусе.
Эта таблица и абстрактная диаграмма суммируют возможности, доступные в этой модели.
| Включение тормозов | Блокировка сцепления | Независимые DoF |
|---|---|---|
| Тормоз отключен | Разблокированы оба блока сцепления передач | Два: слева и справа от блоков сцепления передач |
| Блокируется один блок сцепления | Первый: слева от тормозной колодки сцепления | |
| Тормоз включен | Тормозная колодка сцепления разблокирована | Два: слева и справа от блоков сцепления передач |
| Тормозная колодка сцепления заблокирована | Первый: Слева от блоков сцепления передач |
Степени свободы в простой передаче
![]()
Конструкция графика сцепления, реализованная в подсистеме графика сцепления, исключает нефизические конфигурации. Рассматривать их стоит в любом случае, ради полного понимания конструкции трансмиссии. Дополнительные сведения о проблемах сцепления см. в разделе Устранение неполадок при моделировании и моделировании трансмиссии.
Оба зубчатых сцепления заблокированы, тормоз сцепления разблокирован. Эта конфигурация создает конфликт DoF и сводит независимые DoF к единице. Ось трансмиссии справа от блоков зубчатых муфт пытается вращаться с двумя различными скоростями, как того требуют два разных передаточных числа. Два заблокированных сцепления накладывают два дополнительных ограничения на два оставшихся DoF, но образуют замкнутый контур, номинально оставляя одну свободу в механизме. Из-за конфликта DoF попытка смоделировать такую конфигурацию приводит к ошибке привода Simscape.
Если бы два зубчатых колеса имели одинаковые передаточные числа, DoF не конфликтовали бы, и моделирование выполнялось бы без ошибок.
Заблокировано одно зубчатое сцепление, заблокировано тормозное устройство. Эта конфигурация также создает конфликт DoF и дает ноль DoF. Два заблокированных сцепления накладывают два дополнительных ограничения на два оставшихся DoF и не оставляют в механизме никакой свободы. Приводимая в движение осью трансмиссии влево, ось трансмиссии между блоками зубчатых муфт пытается вращаться, но оказывается заблокированной по отношению к механической оси вращения. Попытка смоделировать такую конфигурацию приводит к ошибке привода Simscape.
Оба зубчатых сцепления заблокированы, тормоз сцепления заблокирован. Эта конфигурация также чрезмерно ограничена. Три заблокированных сцепления накладывают два эффективных ограничения на оставшиеся два DoF (после учета замкнутого контура) и дают NDoF = 0. Кроме того, ось трансмиссии справа от блоков сцепления зубчатой передачи пытается вращаться с двумя различными ненулевыми скоростями, оставаясь заблокированной для механической привязки вращения, создавая два различных конфликта DoF.
