В своей основе многожильная система представляет собой набор тел, связанных через соединения и связанных кинематическими зависимостями, такими как шестерни. Силы и крутящие моменты различных типов позволяют приводить в действие различные тела, а датчики - воспринимать результирующее движение. В программном обеспечении Simscape™ Multibody™ блоки используются для непосредственного представления этих компонентов.
Рассмотрим пример четырехпланки Simscape Multibody. Эту модель можно открыть в командной строке MATLAB ®, введяsm_four_bar. Модель состоит из подсистем твердого тела, соединенных между собой соединительными блоками. Блоки соединения определяют степени свободы, доступные между телами. Подсистемы тела определяют через базовую блок-схему свойства тела.
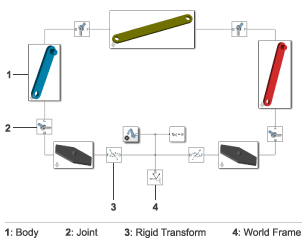
Основные компоненты модели sm_four_bar
Подсистемы тела, в свою очередь, состоят из блоков выдавленного твердого тела, соединенных между собой блоками жесткого преобразования. Блоки выдавленного твердого тела обеспечивают свойства твердого тела, включая геометрию, инерцию, цвет и триады осей, которые кодируют всю информацию о положении и ориентации в модели. Блоки жесткого преобразования поворачивают и перемещают тела для обеспечения правильной сборки тела.
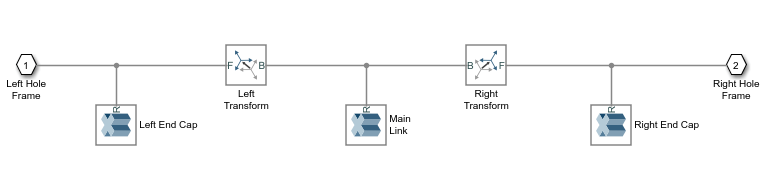
На рисунке показана основная блок-схема для подсистемы тела двоичной линии связи. Эта диаграмма включает в себя три сплошных блока, представляющих центральную и дистальную части двоичного звена. Два блока Rigid Transform перемещают дистальные тела в соответствующие места вблизи концов центрального тела.
Компоненты подсистемы корпуса
Мировая рамка (World Frame) - добавляет к модели инерционную опорную рамку.
Жесткое преобразование (Rigid Transform) - вращение и перемещение тел и других рам относительно друг друга.
Конфигурация механизма (Mechanism Configuration) - определяет гравитационную постоянную в модели.
Конфигурация решателя - задает локальные параметры решателя Simscape, такие как типы, допуски и временные шаги. Это единственный требуемый блок в модели.
Модель можно активировать путем приложения силы или крутящего момента к телу или соединению. Для представления сил и моментов, действующих на тело, Simscape Multibody предоставляет библиотеку сил и моментов. Добавьте блок из этой библиотеки и соедините его с рамой (рамами) корпуса, к которой требуется применить силу или крутящий момент.
| Блок | Функция |
|---|---|
| Внешняя сила и крутящий момент | Общее усилие и/или крутящий момент вне модели с несколькими телами |
| Внутренняя сила | Общая пара сил между двумя произвольными кадрами |
| Сила пружины и демпфера | Подпружиненно-демпферная силовая пара между двумя произвольными рамами |
| Обратная квадратная сила закона | Пара сил с обратной зависимостью от квадратного расстояния между двумя произвольными кадрами (например, электростатические силы Кулона) |
| Гравитационное поле | Гравитационное вытягивание точечной массы на все тела как функция их расстояний до самой точечной массы |
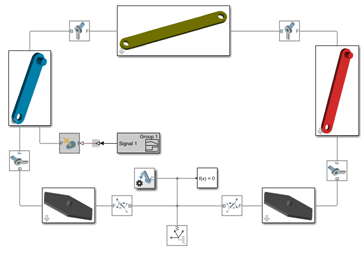
На рисунке показана четырехпалубная модель с блоком внешней силы и крутящего момента для задания силы и крутящего момента на раме кривошипно-шатунного звена.
Чтобы задать силу или крутящий момент, действующие на соединение, Simscape Multibody предоставляет выбор входных сигналов приведения в действие непосредственно в блоках соединения. Каждый примитив соединения - основной компонент блока соединения - обеспечивает выбор вводов приведения в действие, специфичных для этого примитива.
Вводы включения шарнира могут быть двух типов:
Движение (Motion) - определяет изменяющуюся во времени траекторию данного примитива соединения.
Сила или крутящий момент - укажите изменяющуюся во времени силу срабатывания или крутящий момент, действующие на данный примитив соединения.
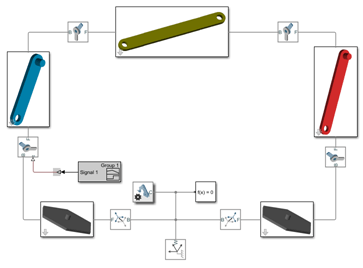
На рисунке показана четырехпалубная модель с крутящим моментом срабатывания, действующим на поворотное соединение.
Можно считывать различные динамические переменные между парами кадров, например, для анализа или проектирования управления. Сенсорные выходы могут быть двух типов:
Движение (Motion) - вычислить и вывести относительное положение, скорость или ускорение между двумя кадрами Simscape Multibody. Движение между соединительными кадрами можно измерить с помощью функции считывания блоков соединения или между произвольными кадрами с помощью блока датчика преобразования.
Сила или крутящий момент - вычислите и выведите силы и крутящие моменты, действующие между двумя рамами Simscape Multibody. Можно измерять силу и крутящий момент между рамами порта определенных блоков Forces и Torques, таких как блок Inverse Square Law Force, или между рамами порта соединительного блока.
Блоки соединения позволяют воспринимать различные типы сил и моментов между соответствующими полками портов, включая:
Приводное усилие или крутящий момент, действующие на данный примитив соединения.
Сила зависимости и крутящий момент, действующие по всему соединению, предотвращают движение по нормали к степеням свободы соединения.
Общая сила и крутящий момент, включая влияние ограничения и примитивного приведения в действие, действующие в масштабах всей системы.
На рисунке показана четырехполосная модель с блоком Transform Sensor для измерения координат траектории между кадром связи ответвителя и мировым кадром.
![]()
