Назначение кинематических переменных из объекта KinematicsSolver в качестве предположений
addInitialGuessVariables( назначает в качестве угадывающих переменных кинематические переменные, перечисленные в ks,ids)KinematicsSolver объект ks под названиями, приведенными в ids аргумент. В этой роли могут выступать как переменные соединения, так и переменные кадра. Те, которые действительно смещают решатель к одному из одинаково правдоподобных решений, когда существует несколько. Предполагаемые переменные являются необязательными, но важными путеводителями для решения некоторых кинематических проблем.
Выходные данные представляют собой обновленную таблицу с предполагаемыми переменными - как новыми, так и старыми - в строках. Каждая строка дает идентификатор переменной, тип и путь блока соединения, которому она принадлежит, если переменная соединения, базовый и следящий кадры, из которых она порождается, если переменная кадра, и единицу измерения для ее числового значения. Переменные ранжируются в порядке добавления.
Большинство переменных можно назначить по отдельности. Несколько должны быть назначены в группах - компоненты оси вдоль угла поворота в сферических примитивах; угол изгиба вдоль азимутального угла в примитивах постоянной скорости. (Угол изгиба может быть назначен отдельно, но азимутальный угол не может.)
Не предпринимается попытка удовлетворить приближение переменных. Они являются отправной точкой в поиске решения. Используйте их только для смещения решателя к подходящему решению, когда существует несколько.
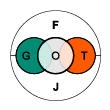
На рисунке показаны переменные общего KinematicsSolver объект. Целевые (T), предполагаемые (G) и выходные (O) переменные могут быть общими переменными (J) или кадровыми переменными (F). Одна и та же переменная может служить в качестве предположения и вывода, но если она служит в качестве цели, она не может удвоиться в качестве предположения. Назначение угадывающей переменной в качестве цели очищает ее как догадку.
clearInitialGuessVariables | initialGuessVariables | KinematicsSolver | removeInitialGuessVariables
