Технология, используемая при синтезе, расширяет методы синтеза H∞ до создания надежного контроллера для неопределенной установки. Вы можете выполнить synthesis на растениях с неопределенностью параметров, динамической неопределенностью или и то, и другое с помощью musyn команда.
musyn ищет контроллер, который минимизирует надежную H∞ производительность системы с замкнутым контуром. Надежная производительность H∞, также называемая λ, количественно определяет, как смоделированная неопределенность влияет на производительность цикла обратной связи. Для получения более подробной информации о λ и том, как он вычисляется, см. Надежный показатель производительности для синтеза Mu.
Вы можете использовать musyn кому:
Синтезируйте неструктурированные надежные контроллеры «черного ящика».
Надежная настройка контроллера фиксированного порядка или фиксированной структуры, состоящего из настраиваемых компонентов, таких как контроллеры PID, модели пространства состояний и статические коэффициенты усиления.
γ синтез неструктурированных контроллеров аналогичен синтезу контроллеров с hinfsyn, за исключением того, что установка включает неопределенность. Как и с hinfsyn, вы настраиваете свою проблему как систему обратной связи CL = lft(P,K), где P является заводом и K является контроллером для проектирования.
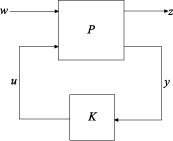
На схеме:
w представляет входы возмущений.
u представляет управляющие входы.
z представляет выходные сигналы ошибок, которые должны оставаться малыми.
y представляет выходные сигналы измерений, подаваемые в контроллер.
Неопределенная установка P строится путем построения модели состояния-пространства с неопределенными коэффициентами (ureal или ucomplex) блоки, неопределенная динамика (ultidyn блоки) или оба. Построить установку таким образом, чтобы выходы измерения y были последними выходами, а управляющие входы u были последними входами. Как и с hinfsyn, можно дополнительно увеличить входные и выходные данные установки с помощью функций взвешивания (фильтров формирования контуров), которые представляют цели управления.
Затем вы передаете это растение musyn, который ищет контроллер К, который минимизирует надежную производительность H∞. Контроллер возвращается как модель пространства состояний. Простой пример см. в разделе Синтез неструктурированного надежного контроллера на musyn справочная страница.
Вместо получения контроллера, который является моделью свободного состояния-пространства, можно указать фиксированную структуру контроллера с настраиваемыми параметрами. musyn затем корректирует эти параметры для минимизации надежной H∞ производительности системы. pciсинтез контроллеров фиксированной структуры аналогичен настройке контроллера на hinfstruct, за исключением того, что установка включает неопределенность.
Чтобы настроить задачу для синтеза с фиксированной структурой, необходимо построить обобщенное состояние-пространство (genss) модель неопределенной замкнутой системы с перестраиваемыми элементами контроллера. Для этого создаются и соединяются:
Числовые модели LTI, представляющие фиксированные компоненты системы управления
Неопределенные блоки проектирования управления, такие как ureal и ultidyn блоки, представляющие неопределенные компоненты установки
Дополнительные функции взвешивания LTI (фильтры формирования контуров), представляющие цели управления
Настраиваемые блоки управления, такие как tunablePID, tunableSS, и tunableGain для представления перестраиваемых компонентов системы
Пример создания такой модели см. в разделе Создание настраиваемой модели системы управления с неопределенными параметрами.
Вы передаете настраиваемую, неопределенную модель с замкнутым контуром в musyn, которая ищет значения перестраиваемых параметров, которые оптимизируют производительность надежного H∞ от входов модели до ее выходов. Простой пример см. в разделе Надежная настройка контроллера фиксированной структуры на musyn справочная страница.
При наличии модели системы управления Simulink ® можно использоватьslTuner линеаризацию модели с заданными неопределенными параметрами и настраиваемыми блоками. Затем вы используете getIOTransfer для извлечения genss модель для проектирования контроллера с musyn. Пример см. в разделе Неопределенность модели в Simulink для надежной настройки.
musyn возвращает надежный контроллер K (для настройки неструктурированного контроллера) или настроенной версии системы управления CL (для настройки контроллера фиксированной структуры). Это также возвращает наилучшую достигнутую надежную производительность H∞, поскольку CLperf выходной аргумент. Это значение указывает, что с контроллером, возвращенным musyn, пиковый коэффициент усиления системы с замкнутым контуром остается ниже CLperf для неопределенности до 1/CLperf в нормированных единицах. Например:
CLperf = 0.5 означает, что коэффициент усиления по замкнутому контуру остается ниже 0.5 для неопределенности до удвоенной неопределенности, указанной во входной модели. Наихудший коэффициент усиления для указанной неопределенности обычно меньше.
CLperf = 2 означает, что коэффициент усиления по замкнутому контуру остается ниже 2 для неопределенности до половины неопределенности, указанной в CL. Для этого значения наихудший коэффициент усиления для полной заданной неопределенности может быть намного больше. Она может быть даже бесконечной, что означает, что система не остается стабильной во всем диапазоне заданной неопределенности.
Дополнительные сведения об этом количестве и его вычислении см. в разделе Измерение надежной производительности для синтеза Mu.
Найти K, musyn использует итеративный процесс, называемый D-K итерацией. Этот процесс решает последовательность масштабированных задач H∞. Частотно-зависимые шкалы, называемые D и G шкалами, используют преимущество структуры неопределенности. Для выполнения итерации D-K musyn:
Использует синтез H∞ для поиска контроллера, который минимизирует коэффициент усиления номинальной системы по замкнутому контуру.
Выполняет анализ надежности для оценки надежной H∞ производительности системы с замкнутым контуром. Это количество выражается как масштабированная H∞ норма, включающая D и G шкалы (шаг D).
Поиск нового контроллера для минимизации нормы H∞, полученной на шаге 2 (шаг K).
Повторяет шаги 2 и 3 до тех пор, пока надежная производительность не перестанет улучшаться.
Математические сведения о работе этого алгоритма см. в разделе Процесс итерации D-K.
musyn предоставляет два способа мониторинга и интерпретации хода выполнения алгоритма: отображение по умолчанию и полное отображение.
musyn ПоказПо умолчанию musyn обеспечивает краткое отображение хода выполнения алгоритма в окне команд MATLAB ®. Например:
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 100 5.747 6.394 10 4
2 5.221 3.433 4.607 10 6
3 2.682 2.263 2.627 10 4
4 1.987 1.687 2.18 10 6
5 1.287 1.192 1.377 10 8
6 1.079 1.087 1.09 10 8
7 1.076 1.046 1.055 8 6
8 1.049 1.024 1.044 10 6
9 1.045 1.022 1.039 8 6
10 1.04 1.023 1.033 8 6
Best achieved robust performance: 1.02
Дисплей содержит информацию о каждой итерации D-K.
K Step столбец - для первой итерации это значение является H∞ производительностью номинальной системы с замкнутым контуром после синтеза контроллера. Для оставшихся итераций этот столбец показывает масштабированную норму H∞ после синтеза контроллера.
Peak MU Колонка - Надежная производительность (set, верхнее ограничение на λ) для контроллера, разработанного в K Step.
DG fit column - Масштабированная производительность H∞ после подгонки шкал D и G с рациональными функциями.
Fit order columns - порядки рациональной функции, используемой для соответствия масштабам в этой итерации. Если система имеет только сложную неопределенность, или когда 'MixedMU' вариант musynOptions имеет значение 'off', то musyn не применяет G-масштабирование. В этом случае отображается только порядок посадки D.
Если вы видите большую разницу между Peak MU и DG Fit значения в данной итерации, это знак, который musyn не может найти хорошую подгонку для шкал. В этом случае можно попытаться увеличить максимальный порядок подгонки с помощью 'FitOrder' вариант musynOptions.
Другие способы улучшения результатов см. в разделе Улучшение результатов синтеза мю.
musyn ПоказДля получения более подробного представления о ходе итерации D-K установите 'Display' вариант musynOptions кому 'full'. Если включить полный дисплей, то musyn приостанавливается после каждой итерации D-K, чтобы можно было просмотреть подробные результаты итерации. В дополнение к информации, описанной в разделе Отображение мусына по умолчанию, полный экран:
Показывает подробную вычислительную информацию для синтеза контроллера (шаг K) текущей итерации. Неструктурированные контроллеры см. в разделе hinfsyn для получения информации об этом дисплее. Для получения информации о контроллерах фиксированной структуры см. hinfstructOptions.
Отображает информацию о посадках для D-масштабирования и G-масштабирования (если таковые имеются) текущей итерации. Информация включает в себя порядок подгонки шкал для каждого неопределенного блока. Он также включает оценку доброты. Оценка, меньшая или равная 1, указывает на адекватную пригодность для γ-синтеза.
Создает графики, которые позволяют визуализировать посадки D и G, устойчивую производительность перед подгонкой и масштабируемую производительность H∞ после подгонки. Изучение этих графиков может помочь определить, достаточно ли высок максимальный порядок подгонки, чтобы зафиксировать все частотно-зависимые вариации в шкалах (см. FitOrder вариант musynOptions для получения дополнительной информации.
D Fit или D,G Fit график показывает масштабные данные и соответствующие рациональные посадки.
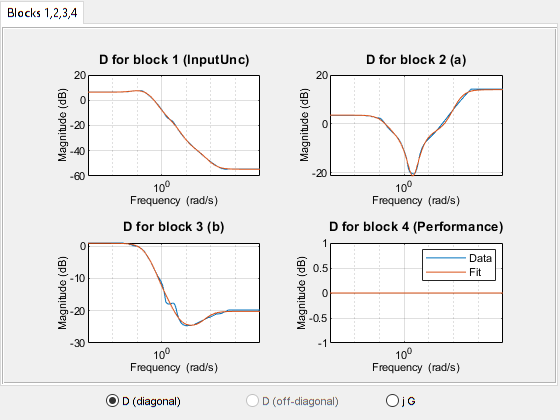
С помощью переключателей выберите, какие шкалы следует проверить:
D (diagonal) показывает величину диагональных элементов D-шкал.
D (offdiagonal) показывает величину и фазу внедиагональных элементов D-шкал. Этот график доступен, когда система имеет повторяющиеся неопределенные блоки. (См. раздел 'FullDG' вариант musynOptions для получения дополнительной информации
jG показывает величину и фазу G-масштабирования. G-шкалы присутствуют только тогда, когда существует реальная неопределенность и MixedMU вариант musynOptions является 'on'. См. раздел Улучшение результатов синтеза мю.
Robust Performance График показывает производительность системы с замкнутым контуром до и после установки.
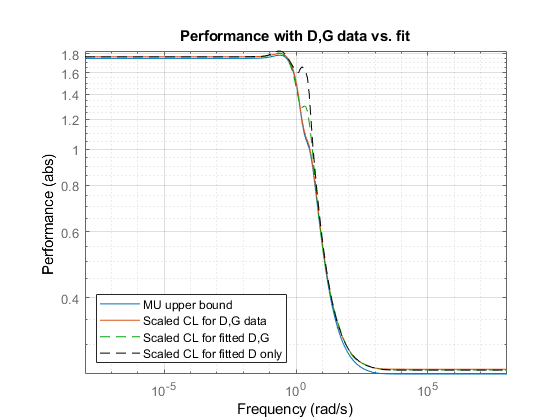
Следы на этом графике:
Mu upper bound - Надежная производительность, верхняя граница
Scaled CL for D,G data - Масштабируемая производительность H∞ перед подгонкой данных масштабирования D и G с рациональными функциями
Scaled CL for fitted D,G - Масштабируемая производительность H∞ после установки
Scaled CL for fitted D only - Показывает, какое поведение не было бы зафиксировано, если бы G был опущен
Подробные сведения об алгоритме итерации D-K и значении всех величин на полном экране см. в разделе Процесс итерации D-K.
