Задание неопределенности в блоке «Пространство неопределенного состояния» делает неопределенность частью модели Simulink ® и влияет как на моделирование, так и на линеаризацию. Этот подход используется для изменения неопределенности и анализа влияния на моделирование или линеаризацию.
Чтобы задать неопределенность в блоке «Пространство неопределенного состояния»:
Перетащите блок пространства неопределенного состояния из библиотеки блоков Toolbox™ надежного управления в модель Simulink. Дополнительные сведения об открытии библиотеки блоков см. в разделе Блоки Simulink для анализа неопределенности.
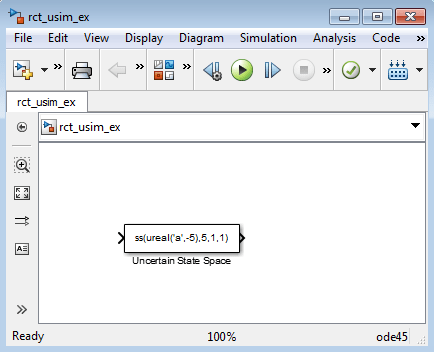
В модели Simulink дважды щелкните блок «Пространство неопределенного состояния», чтобы открыть диалоговое окно «Параметры функционального блока: Пространство неопределенного состояния», как показано на следующем рисунке.
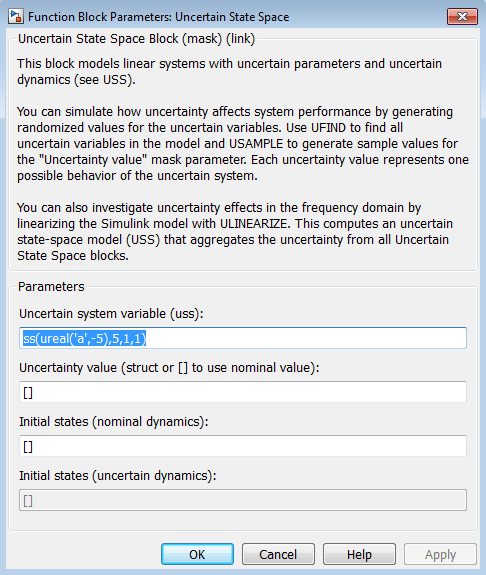
Укажите неопределенную модель состояния-пространства в поле Неопределенная системная переменная (uss). Модель должна быть uss объект или любая другая модель, которая может быть преобразована в uss, такие как umat, ureal, umargin, и ultidyn. Модель зависит от набора неопределенных переменных (ureal, umargin, или ultidyn) и можно указать модель одним из следующих способов:
Функция или выражение, которое вычисляет uss модель. Например, ss(ureal('a',-5),5,1,1).
Переменная, определенная в рабочей области MATLAB ®. Например ,unc_sys, где unc_sys определяется как ss(ureal('a',-5),5,1,1) в рабочей области.
Укажите значения неопределенных переменных, которые использует модель неопределенного состояния-пространства, заданная на шаге 3. Например, если указать неопределенную систему как ureal('g',2)*tf(1,[ureal('tau'),1]), то необходимо указать значения неопределенных переменных g и tau. Для этого введите структуру с полями. g и tau в поле Значение неопределенности (struct или [] для использования номинального значения). Также можно ввести [] для использования номинальных значений неопределенных параметров g и tau.
Совет: Это поле также можно использовать для изменения значений неопределенности при моделировании Монте-Карло. Дополнительные сведения см. в разделе Моделирование эффектов неопределенности.
(Необязательно) Укажите начальные состояния номинальной и неопределенной динамики в полях Начальные состояния (номинальная динамика) и Начальные состояния (неопределенная динамика) соответственно.
Дополнительные сведения о параметрах блока см. на странице ссылок на блок «Неопределенное состояние пространства».
После задания неопределенности в блоках «Неопределенное состояние пространства» можно выполнить одно из следующих действий.
Моделирование модели с использованием номинальных, определяемых вручную или случайных значений, как описано в разделе Моделирование эффектов неопределенности.
Выполните неопределенную линеаризацию, как описано в разделе Получение модели неопределенного состояния-пространства из модели Simulink.
