UAV Toolbox предоставляет структуру совместного моделирования, которая моделирует алгоритмы управления в Simulink ® и визуализирует их производительность в виртуальной среде моделирования. В этой среде используется Unreal Engine ® от Epic Games ®.
Блоки симулятора, относящиеся к среде моделирования, можно найти в библиотеке блоков БПЛА Toolbox > Simulation 3D. Эти блоки обеспечивают возможность:
Настройка предварительно созданных сцен в среде моделирования.
Размещение и перемещение БПЛА в пределах этих сцен.
Настройте камеры и лидарные датчики на транспортных средствах.
Имитация выходных сигналов датчиков на основе окружения вокруг БПЛА.
Получение исходных данных истинности для семантической сегментации и глубинной информации.
Этот инструмент моделирования обычно используется для дополнения реальных данных при разработке, испытаниях и проверке работоспособности алгоритмов полета БПЛА. В сочетании с моделью БПЛА можно использовать эти блоки для выполнения реалистичных имитаций с замкнутым контуром, которые охватывают весь стек управления полетом БПЛА, от восприятия до управления.
Дополнительные сведения о среде моделирования см. в разделе Как работает моделирование нереального двигателя для БПЛА.
Для доступа к панели инструментов БПЛА > библиотеке 3D моделирования в командной строке MATLAB ® введитеuavsim3dlib.
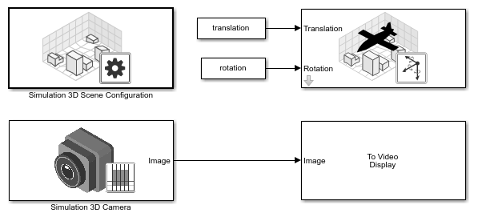
Чтобы настроить модель для совместного моделирования с расчетной средой, добавьте в модель блок «Моделирование» 3D «Конфигурация сцены». С помощью этого блока можно выбрать предварительно созданную сцену, где можно протестировать и визуализировать алгоритмы вождения. Следующее изображение из сцены городского блока США.
Панель инструментов включает эти сцены.
| Сцена | Описание |
|---|---|
| Городской блок США | Городской квартал с перекрестками, шлагбаумами и светофорами |
Если у вас есть пакет поддержки UAV Toolbox Interface for Unreal Engine Projects, то вы можете изменить эти сцены или создать новые. Дополнительные сведения см. в разделе Настройка сцен Unreal Engine для БПЛА.
Чтобы определить виртуальное транспортное средство в сцене, добавьте Моделирование 3D блок Транспортного средства БПЛА к Вашей модели. С помощью этого блока можно управлять движением транспортного средства, указывая значения X, Y и Yaw, которые определяют его положение и ориентацию на каждом шаге времени. Транспортное средство автоматически перемещается по земле.
Можно также указать цвет и тип транспортного средства. Набор инструментов включает следующие типы транспортных средств:
Можно определить виртуальные датчики и прикрепить их к различным позициям на транспортных средствах. Панель инструментов включает эти блоки моделирования и конфигурирования датчиков.
| Блок | Описание |
|---|---|
| Моделирование 3D камеры | Модель камеры с объективом. Включает параметры размера изображения, фокусного расстояния, искажения и перекоса. |
| Имитация 3D камера Fisheye | Камера Fisheye, которую можно описать с помощью модели камеры Scaramuzza. Включает параметры центра искажения, размер изображения и коэффициенты отображения. |
| Моделирование 3D Лидар | Сканирование модели лидарного сенсора. Включает параметры для диапазона обнаружения, разрешения и полей обзора. |
Дополнительные сведения о выборе датчика см. в разделе Выбор датчика для моделирования нереального двигателя.
Блоки моделирования БПЛА Toolbox предоставляют инструменты для тестирования и визуализации планирования пути, управления БПЛА, алгоритмов восприятия.
Среду моделирования Unreal Engine можно использовать для визуализации движения транспортного средства в заранее созданной сцене. Эта среда предоставляет возможность анализа производительности планирования пути и алгоритмов управления транспортным средством. После разработки этих алгоритмов в Simulink можно использовать uavsim3dlib библиотека для визуализации движения транспортного средства в одной из предварительно построенных сцен.
БПЛА Toolbox предоставляет несколько блоков для детального моделирования камеры и лидарного сенсора. Устанавливая эти датчики на БПЛА в виртуальной среде, вы можете генерировать синтетические данные датчиков или обнаружения датчиков для проверки производительности ваших моделей датчиков по алгоритмам восприятия.
После проектирования и тестирования системы восприятия в среде моделирования ее можно использовать для управления системой управления, которая фактически управляет транспортным средством. В этом случае БПЛА вместо того, чтобы вручную устанавливать траекторию, использует систему восприятия, чтобы летать самостоятельно. Объединяя восприятие и управление в замкнутую систему в среде моделирования 3D, можно разрабатывать и тестировать более сложные алгоритмы, такие как автоматизированная доставка.
