Регистрация двух точечных облаков по алгоритму ICP
tform = pcregistericp(moving,fixed)
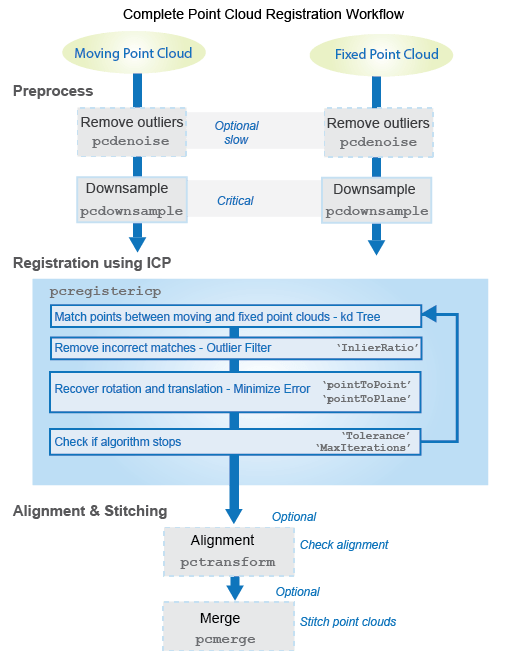
Алгоритм регистрации основан на алгоритме «итеративной ближайшей точки» (ICP). Наилучшая производительность этого итеративного процесса требует настройки свойств данных. Рассмотрите возможность понижающей дискретизации облаков точек с помощью pcdownsample перед использованием pcregistericp повышение точности и эффективности регистрации.
Нормали облака точек требуются алгоритмом регистрации при выборе 'pointToPlane' метрика. Следовательно, если облако входных точек Normal пустое свойство, функция заполняет его. Когда функция заполняет Normal свойство использует 6 точек для подгонки к локальной плоскости. Шесть пунктов могут работать не при всех обстоятельствах. Если регистрация в 'pointToPlane' ошибка метрики, рассмотрите возможность вызова pcnormals функция, позволяющая выбрать количество используемых точек.
[___] = pcregistericp( использует дополнительные параметры, указанные одним или несколькими moving,fixed,Name,Value)Name,Value аргументы пары.
Загрузка данных облака точек.
ptCloud = pcread('teapot.ply'); pcshow(ptCloud); title('Teapot');

Создайте объект преобразования с 30-градусным поворотом вдоль оси z и перемещением [5,5,10].
A = [cos(pi/6) sin(pi/6) 0 0; ... -sin(pi/6) cos(pi/6) 0 0; ... 0 0 1 0; ... 5 5 10 1]; tform1 = affine3d(A);
Трансформируйте облако точек.
ptCloudTformed = pctransform(ptCloud,tform1);
pcshow(ptCloudTformed);
title('Transformed Teapot');
Примените жесткую регистрацию.
tform = pcregistericp(ptCloudTformed,ptCloud,'Extrapolate',true);Сравните результат с истинным преобразованием.
disp(tform1.T);
0.8660 0.5000 0 0
-0.5000 0.8660 0 0
0 0 1.0000 0
5.0000 5.0000 10.0000 1.0000
tform2 = invert(tform); disp(tform2.T);
0.8660 0.5000 0.0000 0
-0.5000 0.8660 0.0000 0
-0.0000 -0.0000 1.0000 0
5.0000 5.0000 10.0000 1.0000
[1] Чен, Я. и Г. Медиони. «Моделирование объектов путем регистрации изображений нескольких диапазонов». Обработка изображений Vision. Баттерворт-Хайнеманн. Том 10, выпуск 3, апрель 1992 года, стр. 145-155.
[2] Бесл, Пол Дж., Н. Д. МакКей. «Метод регистрации фигур 3-D». Транзакции IEEE по анализу шаблонов и машинному интеллекту. Лос-Аламитос, Калифорния: Компьютерное общество IEEE. Том 14, выпуск 2, 1992, стр. 239-256.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcregistercorr | pcregistercpd | pcregisterndt | pcshow | pcshowpair | pctransform