Настройка ПИД-регуляторов для объекта LTI в Live Editor
Задача Tune ПИД-регулятора Live Editor позволяет вам в интерактивном режиме настроить ПИД-регулятор для объекта. Задача автоматически генерирует MATLAB® код для вашего live скрипта. Дополнительные сведения о задачах Live Editor см. в разделе Добавление интерактивных задач к Live Script.
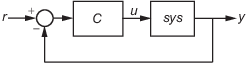
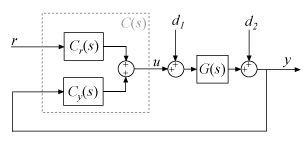
Настройка ПИД-регуляторов автоматически настраивает коэффициент усиления ПИД-регулятора для объекта SISO, чтобы достичь баланса между эффективностью и робастностью. Можно задать тип контроллера, такого как PI, PD или PID с производным фильтром или без него. По умолчанию Tune PID Controller принимает следующее стандартное строение управления с обратной связью блоков.
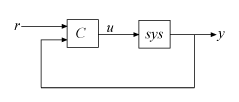
Можно также использовать Tune ПИД-регулятора, чтобы спроектировать 2-DOF ПИД-регуляторы для строения обратной связи на этом рисунке:
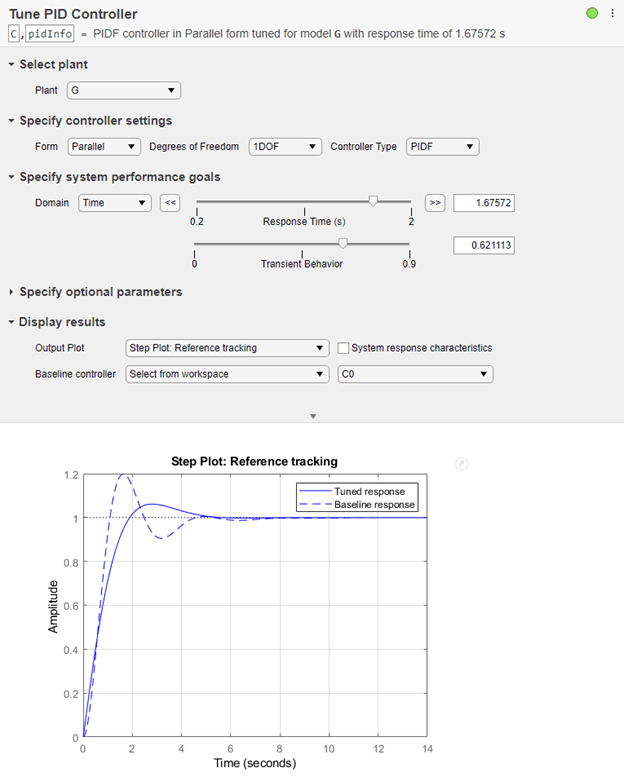
Tune PID Controller генерирует графики для анализа, которые позволяют вам исследовать эффективность контроллера во временных и частотных диапазонах. Можно в интерактивном режиме уточнить эффективность контроллера, чтобы настроить время отклика, цикл полосу пропускания или запас по фазе, или улучшить отслеживание или подавление помех уставки.
Чтобы начать работу с задачей Tune PID Controller, выберите модель объекта управления и укажите тип контроллера, который вы хотите проектировать. Экспериментируйте с ползунками и наблюдайте их эффект на отклик системы с обратной связью. Для получения примера см. ПИД-регулятор Проекта в Live Editor.
Чтобы добавить задачу Tune PID Controller к live скрипту в редакторе MATLAB:
На вкладке Live Editor выберите Task > Tune PID Controller.
В код блоке вашего скрипта введите соответствующее ключевое слово, например tune или PID. Выберите Tune PID Controller от предлагаемых команд заканчиваний.
Plant - Токовый объектВыберите объект для проектирования контроллера. Список содержит модели SISO LTI в непрерывном времени или дискретном времени, существующие в рабочем пространстве MATLAB, такие как:
Пространство состояний (ss), передаточная функция (tf), и нули , полюса и усиления (zpk) модели.
Для данных частотной характеристики (frd) модели. Для таких объектов доступны только цели проекта частотного диапазона и графики отклика.
Обобщенное пространство состояний (genss) или неопределенное пространство состояний (uss) модели. Для таких моделей Tune PID Controllers использует текущее, номинальное значение настраиваемых и неопределенных компонентов.
Идентифицированные модели, такие как idss и idtf модели.
Form - Форма контроллера'Parallel' | 'Standard'Укажите форму контроллера. Эти две формы различаются параметрами, используемыми для выражения пропорциональных, интегральных и производных действий и фильтра на производном члене. Для получения информации о параллельных и стандартных формах смотрите:
Degrees of Freedom - Задайте 1-DOF или 2-DOF контроллер1DOF (по умолчанию) | 2DOFПо умолчанию Tune PID Controller проектирует контроллер с одной степенью свободы (1-DOF). Такой контроллер имеет до четырех коэффициентов (см. «Пропорционально-Интегрально-Производные (ПИД) Контроллеры»).
Можно вместо этого спроектировать 2-DOF с двумя степенями свободы ( ПИД-регулятора). Такие контроллеры включают взвешивание уставки на пропорциональном и производном терминах. 2-DOF ПИД-регуляторы способно быстро подавление помех без значительного увеличения перерегулирования в отслеживании уставки. Можно также использовать 2-DOF ПИД-регуляторы, чтобы уменьшить влияние изменений в опорном сигнале на сигнал управления. Для получения дополнительной информации см. раздел ПИД-регуляторов с двумя степенями свободы.
Controller Type - Укажите условия, которые имеет контроллер'PI' (по умолчанию) | 'PIDF' | 'PID2' | ...Тип контроллера определяет, какие условия присутствуют в ПИД-регуляторе. Для образца ПИ-контроллера имеет пропорциональный и интегральный член. A PDF контроллера имеет пропорциональный член и отфильтрованный производный член. Для получения дополнительной информации о доступных типах контроллеров см. ПИД-регулятор типов для настройки.
Domain - Область для определения целевых показателей эффективности'Time' (по умолчанию) | 'Frequency'Выберите область, в котором задача отображает целевые параметры эффективности.
Time - Используйте ползунки, чтобы задать цели эффективности с точки зрения времени отклика и переходного поведения. Настройка во временной области недоступна для объектов обработки данных с частотной характеристикой, таких как frd объекты.
Frequency - Используйте ползунки, чтобы задать цели эффективности с точки зрения шумовой полосы и запаса по фазе.
Выбор области не влияет на базовое проектирование контроллера или результаты. Вы можете использовать то, что более удобно для вас или более подходит для вашего приложения. Например, если ваши цели проекта включают целевое время нарастания, вы можете найти удобным работать во временном интервале. Если у вас есть целевой цикл полоса пропускания, вы, возможно, предпочтете работать в частотный диапазон. В обеих областях существует компромисс между отслеживанием уставки и эффективностью подавления помех.
Response Time, Transient Behavior - Цели эффективности во временной областиКогда вы задаете Domain Time, используйте эти ползунки, чтобы настроить быстродействие и робастность контроллера.
Используйте Response Time ползунок, чтобы сделать реакцию системы управления с обратной связью быстрее или медленнее. Чтобы изменить пределы ползунка, перетащите ползунок в левый или правый конец. Чтобы уменьшить или увеличить время отклика в 10 раз, нажмите![]() или.
или.![]()
Используйте Transient Behavior ползунок, чтобы сделать контроллер более агрессивным при подавлении помех (меньшие значения) или более устойчивым к неопределенности объекта (большие значения).
Настройка во временной области недоступна для объектов обработки данных с частотной характеристикой, таких как frd объекты.
Bandwidth, Phase Margin - Цели эффективности в частотном диапазонеКогда вы задаете Domain Frequency, используйте эти ползунки, чтобы настроить полосу пропускания и запас по фазе системы управления.
Используйте ползунок Bandwidth, чтобы сделать реакцию системы управления с обратной связью быстрее или медленнее (время отклика 2/ wc, где wc - полоса пропускания). Чтобы изменить пределы ползунка, перетащите ползунок в левый или правый конец. Чтобы уменьшить или увеличить пропускную способность в 10 раз, нажмите![]() или.
или.![]()
Для контроллеров в дискретном времени Tune PID Controller ограничивает максимальную пропускную способность pi/Ts, где Ts - шаг расчета выбранного объекта управления.
Используйте Phase Margin ползунок, чтобы сделать контроллер более агрессивным при подавлении помех (меньшие значения) или более устойчивым к неопределенности объекта (большие значения).
Design focus - Цель эффективности с обратной связью в пользуBalanced (по умолчанию) | Reference tracking | Input disturbance rejectionДля заданного целевого запаса по фазе Tune PID Controller выбирает проектирование контроллера, которая балансирует две меры эффективности, отслеживания уставки и подавления помех. Когда вы изменяете опцию Design focus, алгоритм настройки пытается настроить коэффициенты ПИД в пользу отслеживания уставки или подавления помех при достижении того же целевого запаса по фазе.
Ниже перечислены Design focus опции:
Balanced - Для заданной робастности настройте контроллер, чтобы сбалансировать отслеживание уставки и подавление помех.
Reference tracking - По возможности настройте контроллер в пользу отслеживания уставки.
Input disturbance rejection - Настройте контроллер, чтобы поддержать подавление помех, если это возможно.
Чем больше настраиваемых параметров в системе, тем больше вероятность того, что алгоритм ПИД может достичь желаемого проектного особого внимания, не жертвуя робастностью. Для примера установка особого внимания проекта с большей вероятностью будет эффективной для ПИД-регуляторов, чем для P или ПИ-контроллеров.
Во всех случаях, насколько можно настроить эффективность системы, сильно зависит от свойств объекта. Для некоторых объектов изменение опции Design Focus может иметь небольшой эффект или не иметь никакого эффекта.
Integral formula, Filter formula - Формула для дискретных интегральных и производных членовForward Euler (по умолчанию) | Backward Euler | TrapezoidalДля ПИД-регуляторов в дискретном времени существуют различные способы реализации терминов интегратора и фильтра. Для образца, для дискретного времени ПИД-регулятора параллельной формы, функция передачи контроллера
IF (z) и DF (z) являются discrete integrator formulas для интегратора и производного фильтра. (Чтобы видеть, как IF (<reservedrangesplaceholder2>) и DF (<reservedrangesplaceholder0>) затрагивают другие формы контроллера, включая стандартную форму и контроллеры С 2 СТЕПЕНЯМИ СВОБОДЫ, посмотрите Дискретное время Контроллеры Proportional-Integral-Derivative (PID).)
Используйте Integral formula и Filter formula, чтобы выбрать значения IF (z) и DF (z), соответственно.
Forward Euler - IF (z) или DF (z) =
Эта формула лучше всего подходит для небольших шагов расчета, где предел Найквиста велик по сравнению с пропускной способностью контроллера. Для больших шагов расчета, Forward Euler формула может привести к нестабильности, даже когда вы дискретизируете систему, которая стабильна в непрерывное время.
Backward Euler - IF (z) или DF (z) =
Преимущество Backward Euler формулой является то, что дискретизация стабильной системы непрерывного времени с использованием этой формулы всегда приводит к стабильному результату дискретного времени.
Trapezoidal - IF (z) или DF (z) =
Преимущество Trapezoidal формулой является то, что дискретизация стабильной системы непрерывного времени с помощью этого метода всегда приводит к стабильному результату дискретного времени. Всех доступных формул дискретного интегратора, Trapezoidal приводит к ближайшему соответствию между свойствами частотного диапазона дискретизированной системы и соответствующей системы непрерывного времени.
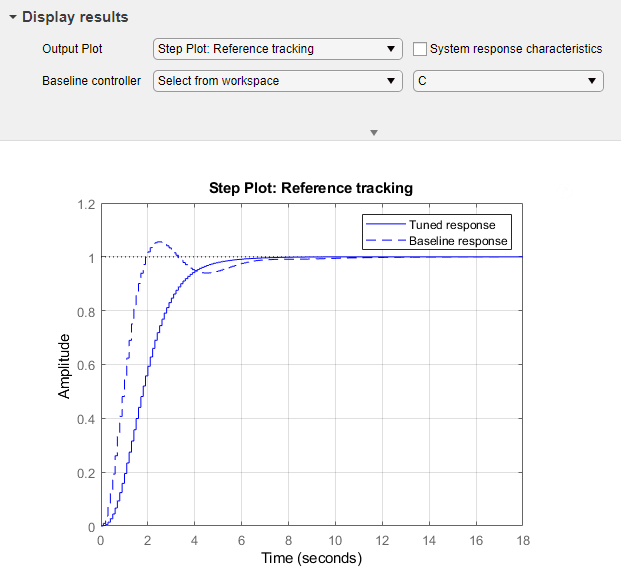
Output Plot - График отклика системы для генерацииStep Plot: Reference tracking (по умолчанию) | Step Plot: Input disturbance rejection | Bode Plot: Open-loop | ...Задайте график отклика для наблюдения эффекта ПИД-регулятора о производительности системы. Можно задать переходный процесс во временной области или диаграмма Боде в частотном диапазоне для различных откликов системы. Код, который генерирует Tune ПИД-регулятор в вашем live скрипте, включает код для генерации выбранного графика.
Для 1-DOF типов ПИД-регулятора, таких как PI, PIDF и PDF, программное обеспечение вычисляет отклики системы на основе следующей одноконтурной архитектуры управления, где G является указанным объектом, а C является ПИД-регулятором:
Для 2-DOF типов ПИД-регулятора, таких как PI2, PIDF2 и I-PD, программное обеспечение вычисляет отклики на основе следующей архитектуры:
Отклики системы основаны на разложении ПИД-регулятора С 2 СТЕПЕНЯМИ СВОБОДЫ, C, в <reservedrangesplaceholder3> <reservedrangesplaceholder2> компонента заданного значения и <reservedrangesplaceholder1> <reservedrangesplaceholder0> компонента обратной связи, как описано в ПИД-регуляторах с двумя степенями свободы.
В следующей таблице представлены доступные ответы для графиков для анализа. (Для объектов данных частотной характеристики, таких как frd модели, графики отклика во временной области недоступны.)
| Ответ | Построенная система (1-DOF) | Построенная система (2-DOF) | Описание |
|---|---|---|---|
Plant | G | G | Реакция объекта. Используется для исследования динамики объекта. |
Open-loop | GC | –GCy | Ответ системы разомкнутого контура контроллер-установка. Используйте для проекта частотного диапазона. Используйте, когда спецификации проекта включают критерии робастности, такие как разомкнутые контуры запаса по амплитуде и запас по фазе. |
Reference tracking | (от r до y) | (от r до y) | Замкнутый цикл отклика системы с переходом на шаг в уставке. Используйте, когда спецификации проекта включают отслеживание уставки. |
Controller effort | (от r до u) | (от r до u) | Контроллер выход с обратной связью на шаг изменения уставки. Используйте, когда ваш проект ограничен практическими ограничениями, такими как насыщение контроллера. |
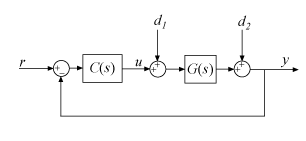
Input disturbance rejection | (с d 1 по y) | (с d 1 по y) | Замкнутый отклик системы для загрузки нарушения порядка (шаг, нарушение порядка на входе объекта). Используйте, когда ваши проекты спецификации включают вход подавления помех. |
Output disturbance rejection | (с d 2 по y) | (с d 2 по y) | Замкнутый цикл отклика системы к шагу, нарушению порядка на объект выходе. Используйте, когда вы хотите анализировать чувствительность к ошибкам моделирования. |
System response characteristics - Отображение числовых характеристик обратной связиoff (по умолчанию) | onВыберите эту опцию, чтобы сгенерировать отображение числовых характеристик отклика замкнутого или разомкнутого контура.
Когда Output Plot является шаговым графиком, отображение включает такие характеристики, как время нарастания, время урегулирования и процент перерегулирования. Эти значения всегда являются значениями замкнутого контура, переходной характеристикой от входных r системы управления до вывода y, независимо от того, какие конкретные переходные характеристики вы выбираете для графика. Настройка использования ПИД-регуляторов stepinfo для вычисления характеристик переходной характеристики. Для получения дополнительной информации о том, как интерпретировать эти значения, смотрите stepinfo страница с описанием.
Когда Output Plot является диаграммой Боде, отображение включает такие характеристики, как запас по амплитуде и запас по фазе. Эти значения всегда являются значениями разомкнутого контура отклика системы GC, независимо от того, какие конкретные Диаграммы Боде вы выбираете. Настройка использования ПИД-регуляторов allmargin для вычисления характеристик частотной характеристики. Для получения дополнительной информации о том, как интерпретировать эти значения, смотрите allmargin страница с описанием.
Baseline controller - Контроллер для сравнения эффективностиNone (по умолчанию) | Select from workspaceИспользуйте эту опцию, когда хотите сравнить эффективность настроенного контроллера с другим ПИД-регулятором в рабочей области MATLAB. Для этого выберите Select from workspace. Появляется другое меню, содержащее объекты модели ПИД, которые в данный момент находятся в рабочей области. Список включает объекты модели ПИД всех типов (pid, pidstd, pid2, или pidstd2), которые имеют тот же временной интервал, что и текущий указанный объект. Например, если объект является моделью пространства состояний в дискретном времени, то любой объект модели ПИД в дискретном времени в рабочей области доступен в качестве базового контроллера.
Когда вы задаете контроллер базовой линии, график отклика обновляется, чтобы включить пунктирный график отклика системы с контроллером базовой линии.
Можно хранить проект для использования в качестве базовой линии во время дальнейшего эксперимента с типами контроллеров, целями эффективности и другими настройками. Для этого, когда вы находите проект, который вы хотите использовать в качестве опорной структуры:
Обратите внимание на имя переменной рабочей области контроллера в линии сводных данных задач (см. Советы). Например, если имя C, затем токовый контроллер находится в рабочем пространстве MATLAB следующим C.
Измените имя переменной контроллера в линии сводных данных задач. Например, измените его на Cnew.
Выберите Baseline Controller и укажите сохраненный контроллер C как базовая линия.
Когда вы далее экспериментируете с проектированием контроллера, задача хранит изменения контроллера в рабочей области следующим Cnew. График показывает вам ответ базовой линии с помощью C и настроенный ответ с помощью Cnew.
После выбора объекта задача создает контроллер и сохраняет его в рабочем пространстве MATLAB. Сохраненный контроллер является pid, pidstd, pid2, или pidstd2 объект модели, заданный выбранными пользователем параметрами для Form и Degrees of Freedom.
Имя переменной по умолчанию для сохраненного контроллера C. Вы можете изменить имя переменной, введя новое имя в линию сводных данных задач.

Задача также предоставляет информацию о эффективности и робастности системы с обратной связью в структуре, называемой pidInfo по умолчанию. Для получения информации об этой структуре смотрите info выходной аргумент в pidtune страница с описанием.
Tune PID Controller использует алгоритм, обсуждаемый в алгоритме настройки ПИДа.
