Пакет: vision.labeler.loading
Суперклассы: matlab.mixin.Heterogeneous
Интерфейс для загрузки данных о сигнале в приложение Ground Truth Labeler
The vision.labeler.loading.MultiSignalSource класс создает интерфейс для загрузки сигналов от источника данных в Ground Truth Labeler приложение. Источником данных может быть формат файла или любой пользовательский источник.
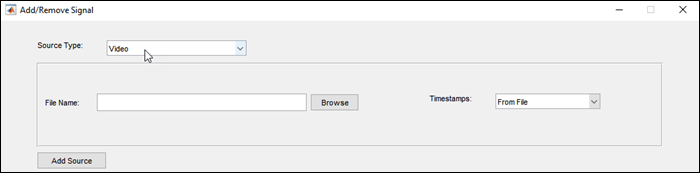
Интерфейс, созданный с использованием этого класса, позволяет вам настроить панель для загрузки пользовательских источников данных в диалоговом окне Add/Remove Signal приложения. Рисунок показывает образец панели загрузки.
Класс также предоставляет интерфейс для чтения систем координат из загруженных сигналов. Приложение визуализирует эти системы координат для маркировки.
Чтобы задать пользовательский класс для загрузки источника данных в приложение, выполните следующие шаги.
Создайте класс, который наследует от vision.labeler.loading.MultiSignalSource класс. Определение класса должно иметь этот формат, где customSourceClass
classdef customSourceClass < vision.labeler.loading.MultiSignalSourceСохраните класс в эту папку, где matlabrootmatlabroot функция.
<matlabroot>\toolbox\vision\vision\+vision\+labeler\+loading
Кроме того, создайте +vision/+labeler/+loading структура папки, добавьте эти папки в путь поиска файлов MATLAB и сохраните класс в +vision/+labeler/+loading папка. Приложение Ground Truth Labeler распознает классы источников данных только в папках с этим путем.
Задайте свойства и методы класса, необходимые для загрузки источника данных в приложение. В этой таблице показаны предопределенные пользовательские классы, которые можно использовать в качестве начальных точек для определения этих свойств и методов.
| Класс | Источник данных, загруженный по классам | Команда для просмотра исходного кода класса |
|---|---|---|
vision.labeler.loading.VideoSource | Видео- файл | edit vision.labeler.loading.VideoSource |
vision.labeler.loading.ImageSequenceSource | Папка последовательности изображений | edit vision.labeler.loading.ImageSequenceSource |
vision.labeler.loading.VelodyneLidarSource | Velodyne® Файл захвата пакетов (PCAP) | edit vision.labeler.loading.VelodyneLidarSource |
vision.labeler.loading.RosbagSource | Файл Росбага | edit vision.labeler.loading.RosbagSource |
vision.labeler.loading.PointCloudSequenceSource | Папка последовательности облаков точек | edit vision.labeler.loading.PointCloudSequenceSource |
vision.labeler.loading.CustomImageSource | Пользовательский формат изображения | edit vision.labeler.loading.CustomImageSource |
Объяснение необходимых свойств и методов, используемых для определения пользовательского класса источника данных, см. в примере «Создать класс для загрузки пользовательских источников достоверные данные».
The vision.labeler.loading.MultiSignalSource класс является handle класс.
Abstract | true |
Для получения информации об атрибутах класса см. раздел «Атрибуты класса».
