Пакет: vision.labeler.loading
Суперклассы: vision.labeler.loading.MultiSignalSource
Загрузите сигналы от источников rosbag в приложение Ground Truth Labeler
The vision.labeler.loading.RosbagSource класс создает интерфейс для загрузки сигналов из файлов rosbag в приложение Ground Truth Labeler. В диалоговом окне Add/Remove Signal приложения, когда Source Type установлено на Rosbag, этот класс управляет параметрами в этом диалоговом окне.
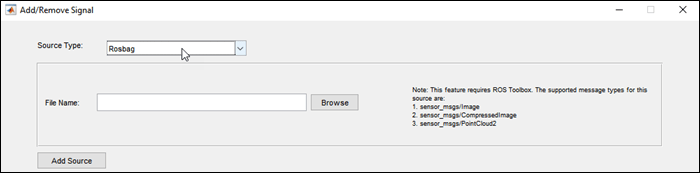
Чтобы получить доступ к этому диалоговому окну, в приложении выберите Import > Add Signals.
Реализация по умолчанию этого класса загружает сигналы от этих типов сообщений ROS:
sensor_msgs/Image
sensor_msgs/CompressedImage
sensor_msgs/PointCloud2
Примечание
Для этого класса требуется ROS Toolbox.
The vision.labeler.loading.RosbagSource класс является handle класс.
При экспорте меток из сеанса Ground Truth Labeler приложения, содержащего источники rosbag, экспортированные groundTruthMultisignal объект хранит образцы этого класса в своем DataSource свойство.
Как создать RosbagSource объект программно, например, когда программно создается groundTruthMultisignal объект, использовать vision.labeler.loading.RosbagSource функция (описанная здесь).
rosbagSource = vision.labeler.loading.RosbagSourceRosbagSource объект для загрузки сигналов от источников данных rosbag. Чтобы задать источник данных и параметры, необходимые для загрузки источника, используйте loadSource способ.
Можно использовать этот класс как начальная точка для создания пользовательского класса загрузки источников данных. Чтобы просмотреть исходный код для этого класса, используйте эту команду:
edit vision.labeler.loading.RosbagSource