Метка достоверных данных для беспилотных аппаратов
Приложение Ground Truth Labeler позволяет пометить достоверные данные в нескольких видео, последовательности изображений или лидар облаков точек.
Используя приложение, вы можете:
Одновременно пометьте несколько перекрывающихся во времени сигналов, представляющих одну и ту же сцену.
Задайте прямоугольные метки видимой области (ROI), метки ROI ломаной линии, пиксельные информации только для чтения метки, кубоидные метки информации только для чтения для маркировки лидара и определения меток сцены. Используйте эти метки для интерактивной маркировки достоверных данных.
Используйте встроенные алгоритмы обнаружения или отслеживания, чтобы пометить достоверные данные.
Запись, импорт и использование пользовательских алгоритмов автоматизации для автоматической маркировки достоверных данных.
Оцените эффективность алгоритмов автоматизации меток с помощью визуальных сводных данных.
Экспортируйте метки основной истины как groundTruthMultisignal объект. Можно использовать этот объект для верификации системы или для настройки детектора объектов или семантической сети сегментации.
Отображение синхронизированных по времени сигналов, таких как данные шины CAN, при помощи driving.connector.Connector API.
Дополнительные сведения об этом приложении см. в разделе Запуске с Ground Truth Labeler.

MATLAB® Панель инструментов: На вкладке Apps, в разделе Automotive, нажмите значок приложения.
Командная строка MATLAB: Ввод groundTruthLabeler.
Сигналы лидар не поддерживают линейные или пиксельные метки информация только для чтения.
Пиксельные метки информация только для чтения не поддерживают подметки или атрибуты.
Кубоидные метки информация только для чтения не поддерживают подметки.
Окно Сводные Данные не поддерживает подметки или атрибуты
В левой части приложения панель ROI Labels содержит видимая область (ROI) метки определений, которую можно пометить на системы координат. Определения меток можно создать непосредственно на этой панели. Также можно программно создать определения меток с помощью labelDefinitionCreatorMultisignal Объект и затем импортируйте эти определения меток в сеанс приложения.
Приложение поддерживает определение меток информация только для чтения, подметок и атрибутов.
ROI label является меткой, которая соответствует видимой области (ROI) в сигнальной системе координат. Таблица описывает поддерживаемые типы меток.
| Информация только для чтения | Описание | Сцена |
|---|---|---|
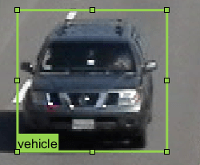
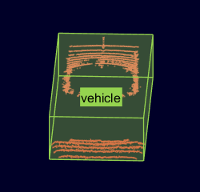
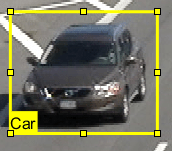
Rectangle/Cuboid | Нарисуйте прямоугольные или кубоидальные метки информация только для чтения вокруг объектов, в зависимости от типа сигнала.
| Транспортные средства, пешеходы, дорожные знаки
|
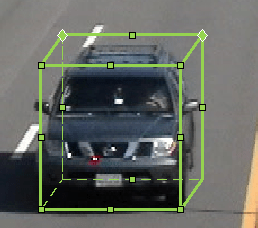
Projected cuboid | Нарисуйте кубоидальные метки информация только для чтения (3-D ограничивающие рамки). |
|
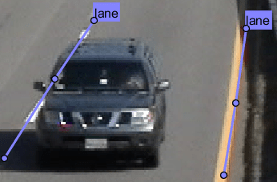
Line | Нарисуйте линейные метки информация только для чтения, чтобы представлять линии. Чтобы нарисовать информацию только для чтения полилинии, используйте две или более точек. | Контуры маршрута, защитные рельсы, дорожные бордюры
|
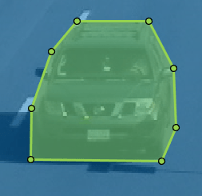
Pixel label | Назначьте метки пикселям для семантической сегментации. Можно пометить пиксели вручную с помощью многоугольников, кистей или заливки. Для получения дополнительной информации о маркировке пикселей смотрите Пиксели меток для семантической сегментации. | Транспортные средства, дорожное покрытие, деревья, дорожное покрытие
|
Polygon | Нарисуйте многоугольник информации только для чтения метки. Можно пометить отдельные образцы одного и того же класса. Для получения дополнительной информации о чертежах меток ROI многоугольника, например, и семантических сетей сегментации, см. «Маркировка объектов с использованием многоугольников» | Транспортные средства, дорожное покрытие, деревья, дорожное покрытие
|
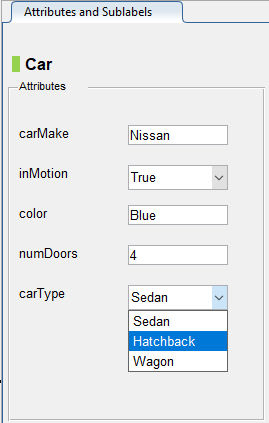
ROI sublabel является меткой информация только для чтения, которая принадлежит родительской метке. Используйте информацию только для чтения подметки, чтобы предоставить больший уровень детализации о ROI в маркированных достоверных данных. Для примера метка vehicle может содержать headlight, licensePlate и wheel подметки. Можно создавать подметки только для прямоугольных и полилинейных меток. Для получения дополнительной информации о подметках смотрите Использование подметок и Атрибуты для маркировки Достоверные Данные.
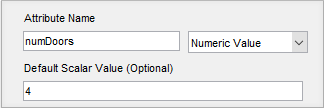
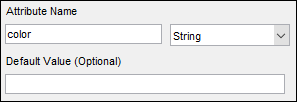
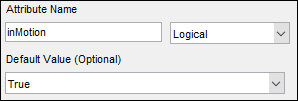
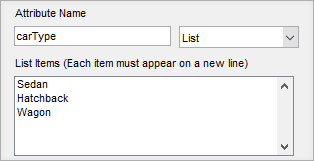
ROI attribute задает дополнительные сведения о метке информация только для чтения или подметке. Для примера в сцене вождения атрибуты могут включать тип или цвет транспортного средства. Таблица описывает поддерживаемые типы атрибутов.
| Тип атрибута | Пример определения атрибута | Пример значений по умолчанию |
|---|---|---|
|
|
|
|
| |
|
| |
|
|
Для получения дополнительной информации об атрибутах смотрите Использование подметок и Атрибуты для маркировки Достоверные Данные.
Чтобы избежать необходимости повторной маркировки основной истины с помощью новых меток, организуйте схему маркировки, которую вы хотите использовать, перед маркировкой основной истины.
Можно копировать и вставлять метки между сигналами одного типа.
driving.connector.Connector | vision.labeler.AutomationAlgorithm | vision.labeler.loading.MultiSignalSource | vision.labeler.mixin.Temporal