Вычислите выход, ошибки и коэффициенты, используя частотный диапазон конечной импульсной характеристики адаптивный фильтр
The dsp.FrequencyDomainAdaptiveFilter Система object™ реализует адаптивный фильтр с конечной импульсной характеристикой (КИХ) в частотный диапазон с помощью алгоритма наименьших квадратов (LMS) быстрого блока. Свойства Length и BlockLength задают длину фильтра и значения длины блока, используемые алгоритмом. Свойство FFTCoefficients содержит дискретное преобразование Фурье коэффициентов текущего фильтра. Объект предлагает ограниченные и неограниченные версии алгоритма с секционированными и не секционированными режимами. Для получения дополнительной информации смотрите Алгоритмы.
Для фильтрации сигнала с помощью частотной конечной импульсной характеристики адаптивного фильтра:
Создайте dsp.FrequencyDomainAdaptiveFilter Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
fdaf = dsp.FrequencyDomainAdaptiveFilterfdaf. Этот Системный объект используется, чтобы вычислить отфильтрованный выход и ошибку фильтра для заданного входного и необходимого сигнала.
fdaf = dsp.FrequencyDomainAdaptiveFilter(len)Length значение свойства установлено в len.
fdaf = dsp.FrequencyDomainAdaptiveFilter(___,Name,Value)
fdaf = dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',0.1) моделирует адаптивный фильтр частотного диапазона с длиной 32 отвода и размером шага 0,1.[ фильтрует входной сигнал, y,err] = fdaf(x,d)x, использование d в качестве необходимого сигнала и возвращает отфильтрованный выход в y и ошибка фильтра в err. Системный объект оценивает веса фильтра, необходимые для минимизации ошибки между выходом сигналом и желаемым сигналом. БПФ этих весов фильтра может быть получен путем доступа к FFTCoefficients свойство после вызова алгоритма объекта.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Передайте квадратурная фаза сигнал сдвига манипуляции (QPSK) через шумный канал передачи. Минимизируйте шум в принятом сигнале с помощью адаптивного фильтра частотного диапазона.
Примечание.Если вы используете R2016a или более ранний релиз, замените каждый вызов объекта эквивалентным синтаксисом шага. Для примера, obj(x) становится step(obj,x).
Сигнал QPSK, s, передается через шумный канал. Числитель и коэффициенты знаменателя канала содержатся в векторах b и a, соответственно. Принятый сигнал r, полученный в конце канала передачи, содержит переданный сигнал QPSK и шум, добавленный в канал, n. Адаптивный фильтр используется для извлечения сигнала QPSK из принятого шумного входа. Желаемый сигнал d является задержанной версией сигнала QPSK.
D = 16; b = exp(1i*pi/4)*[-0.7 1]; a = [1 -0.7]; ntr = 1024; s = sign(randn(1,ntr+D)) + 1i*sign(randn(1,ntr+D)); n = 0.1*(randn(1,ntr+D) + 1i*randn(1,ntr+D)); r = filter(b,a,s) + n; x = r(1+D:ntr+D); d = s(1:ntr);
Создайте dsp.FrequencyDomainAdaptiveFilter объект для моделирования адаптивного фильтра частотного диапазона длиной 32 отвода и размером шага 0,1. Адаптивный фильтр принимает задержанную версию принимаемого сигнала и требуемый сигнал в качестве входов. Выход адаптивного фильтра сравнивается с желаемым сигналом. Ошибка между этими двумя сигналами представляет шум, добавленный к каналу передачи. Адаптивный фильтр обновляет свои коэффициенты, пока эта ошибка не станет минимальной. Чтобы получить дискретное преобразование Фурье коэффициентов фильтра, вызовите fdaf и доступ к свойству FFTCoefficients этого объекта.
mu = 0.1; fdaf = dsp.FrequencyDomainAdaptiveFilter('Length',32,'StepSize',mu); [y,e] = fdaf(x,d); fftCoeffs = fdaf.FFTCoefficients
fftCoeffs = 1×64 complex
0.6802 - 0.6847i -0.2485 - 0.9427i -0.9675 - 0.2123i -0.5605 + 0.8002i 0.5748 + 0.7593i 0.8541 - 0.3917i -0.2526 - 0.9022i -0.9298 + 0.1255i 0.0181 + 0.9366i 0.9207 + 0.0511i 0.1063 - 0.8972i -0.8919 - 0.1829i -0.2668 + 0.9113i 0.9215 + 0.3186i 0.3417 - 0.8859i -0.8285 - 0.3760i -0.4317 + 0.8200i 0.8741 + 0.4765i 0.4874 - 0.9075i -0.8517 - 0.4774i -0.4709 + 0.7632i 0.7468 + 0.4833i 0.5193 - 0.7995i -0.8218 - 0.5649i -0.5908 + 0.7768i 0.7316 + 0.5866i 0.5806 - 0.7270i -0.7148 - 0.5998i -0.6287 + 0.6702i 0.6575 + 0.6379i 0.6332 - 0.7153i -0.7659 - 0.6424i -0.6678 + 0.7294i 0.6536 + 0.6891i 0.7006 - 0.6333i -0.6594 - 0.7117i -0.7207 + 0.6517i 0.6031 + 0.7239i 0.7362 - 0.5776i -0.5869 - 0.7682i -0.7975 + 0.5789i 0.5449 + 0.7992i 0.7909 - 0.5343i -0.5512 - 0.8070i -0.8392 + 0.5338i 0.4605 + 0.8493i 0.8358 - 0.3921i -0.3751 - 0.8388i -0.8739 + 0.3785i 0.3625 + 0.9048i
Постройте график Синфазный и Квадратурные компоненты требуемых, выходных и сигналов ошибки.
plot(1:ntr,real([d;y;e])) legend('Desired','Output','Error') title('In-Phase Components') xlabel('Time Index'); ylabel('signal value')

plot(1:ntr,imag([d;y;e])) legend('Desired','Output','Error') title('Quadrature Components') xlabel('Time Index') ylabel('signal value')

Создайте графики поля точек принимаемого сигнала и необходимого сигнала.
plot(x(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Received Signal Scatter Plot') axis('square') xlabel('Real[x]') ylabel('Imag[x]') grid on

plot(d(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Desired Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on

Адаптивный фильтр выравнивает принятый сигнал для устранения шума. Постройте график графика поля точек уравненного сигнала.
plot(y(ntr-100:ntr),'.') axis([-3 3 -3 3]) title('Equalized Signal Scatter Plot') axis('square') xlabel('Real[y]') ylabel('Imag[y]') grid on

Используйте адаптивный фильтр частотного диапазона, чтобы оценить коэффициенты длинной конечной импульсной характеристики. Конечная импульсная характеристика моделирует импульсную характеристику помещения. Используйте секционированный режим в адаптивном фильтре частотного диапазона, чтобы уменьшить задержку фильтра.
Примечание.Этот пример выполняется только в R2018a или более поздней версии.
Инициализация
Произведите длинную импульсную характеристику конечной импульсной характеристики 8 192 выборок и назначьте импульсную характеристику на dsp.FIRFilter объект, room. Этот объект моделирует импульсную характеристику комнаты. Создайте dsp.FrequencyDomainAdaptiveFilter фильтр, lmsfilt, в секционированном ограниченном режиме. Установите длину фильтра равную одной четверти длины импульсной характеристики помещения. Установите длину блока фильтра равным 128 выборкам. Установите размер шага 0,025, начальную степень 0,01, средний коэффициент 0,98, смещение 1 и коэффициент утечки 1. Инициализируйте dsp.ArrayPlot объект для просмотра коэффициентов фильтра. Инициализируйте timescope объект, чтобы показать среднюю квадратную ошибку между выходом фильтра и желаемым сигналом.
fs = 16e3; m = 8192; [b,a] = cheby2(4,20,[0.1 0.7]); impulseResponseGenerator = dsp.IIRFilter(... 'Numerator', [zeros(1,6) b], ... 'Denominator', a); roomImpulseResponse = impulseResponseGenerator( ... (log(0.99*rand(1,m)+0.01).*sign(randn(1,m)).*exp(-0.002*(1:m)))'); roomImpulseResponse = roomImpulseResponse/norm(roomImpulseResponse); room = dsp.FIRFilter('Numerator',roomImpulseResponse'); lmsfilt = dsp.FrequencyDomainAdaptiveFilter(... 'Method','Partitioned constrained FDAF',... 'Length',m/4, ... 'BlockLength',128,... 'StepSize',0.025, ... 'InitialPower',0.01, ... 'AveragingFactor',0.98,... 'Offset',1,... 'LeakageFactor',1); FrameSize = lmsfilt.BlockLength; NIter = 2000; AP = dsp.ArrayPlot('YLimits',[-0.2 .2],'ShowLegend',true, ... 'Position',[0 0 560 420],'ChannelNames', ... {'Actual Coefficients','Estimated Coefficients'}); TS = timescope('SampleRate',fs,'TimeSpanSource','property',... 'TimeSpan',FrameSize*NIter/fs,... 'TimeUnits','Seconds',... 'YLimits',[-50 0],'Title','Learning curve',... 'YLabel','dB', ... 'BufferLength',FrameSize*NIter,... 'ShowGrid',true); signalmean = dsp.MovingAverage('SpecifyWindowLength',false);
Вытекание
Сгенерируйте случайный входной сигнал, используя randn функция. Формат кадра входа соответствует длине блока адаптивного фильтра. Желаемый сигнал является суммой выхода конечной импульсной характеристики (комната) и белого Гауссова сигнала шума. Передайте входной сигнал и требуемый сигнал в адаптивный фильтр. Вычислите выход адаптивного фильтра и ошибку между выходом и желаемым сигналом.
Оцените коэффициенты временной области адаптивного фильтра, взяв ОБПФ вектора коэффициентов частотного диапазона, возвращенного lmsfilt.FFTCoefficients свойство. Сравните оцененные коэффициенты с фактическими коэффициентами, присвоенными конечной импульсной характеристике фильтру (комнате). Как только адаптивный фильтр сходится свой выход к желаемому сигналу и минимизирует сигнал ошибки, оцененные коэффициенты тесно совпадают с фактическими коэффициентами. Это означает, что адаптивный фильтр успешно приспособился для моделирования импульсной характеристики конечной импульсной характеристики (помещения).
for k = 1:NIter x = randn(FrameSize,1); d = room(x) + 0.01*randn(FrameSize,1); [y,e] = lmsfilt(x,d); FFTCoeffs = lmsfilt.FFTCoefficients; w = ifft(FFTCoeffs,[],2,'symmetric'); w = w(:,1:FrameSize) + w(:,FrameSize+1:end); w = reshape(w.',1,m/4); AP([roomImpulseResponse(1:m/4),w.']); TS(10*log10(signalmean(abs(e).^2))); end


Когда фильтр адаптируется со временем, вы можете увидеть во временных возможностях, что средняя квадратная ошибка становится минимальной. Одновременно оцененные коэффициенты тесно совпадают с фактическими коэффициентами на графике массива.
Адаптивная фильтрация частотного диапазона состоит из трех шагов - фильтрация, оценка ошибки и адаптация к весу отвода. Этот алгоритм реализует конечную импульсную характеристику фильтрацию в частотный диапазон с помощью overlap-save или метода перекрытия-суммы. Для получения дополнительной детали реализации этих двух методов см. Раздел «Алгоритмы» в dsp.FrequencyDomainFIRFilter страница объекта. Оценка ошибки и адаптация веса отвода реализованы с помощью LMS-алгоритма быстрого блока (FBLMS).
Адаптивный фильтр частотного диапазона обрабатывает входные данные и требуемые данные сигнала как блок выборок, используя алгоритм FBLMS (FBLMS). Вот блок адаптивного фильтра частотного диапазона с использованием алгоритма FBLMS. Фильтр частотного диапазона конечной импульсной характеристики в этой схеме использует метод сохранения перекрытия.
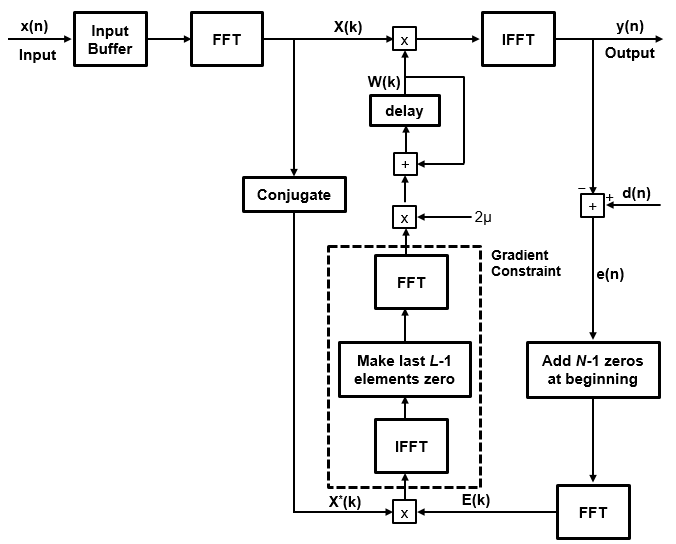
где:
N -- Длина фильтра
L -- Длина блока
μ -- Параметр размера шага
x(n) -- Входной сигнал
X(k) -- Преобразованный входной сигнал в частотный диапазон
d(n) -- Желаемый сигнал
e(n) -- Ошибка между желаемым сигналом и выходом фильтра
E(n) -- Преобразованный сигнал ошибки в частотный диапазон
W(k) -- Вектор весов касания в частотный диапазон
Для получения дополнительной информации о том, как вычисляется ошибка и адаптируются веса отводов, см. [2].
[1] Shynk, J.J. «Frequency-Domain and Multirate Adaptive Filtering». Журнал обработки сигналов IEEE. Том 9, № 1, 1992, стр. 14-37.
[2] Farhang-Boroujeny, B., Adaptive Filters: Theory and Applications, Chichester, England, Wiley, 1998.
[3] Стокхэм, Т. Г., младший «Высокоскоростная свертка и корреляция». Материалы Весенней совместной компьютерной конференции 1966 года, AFIPS, том 28, 1966, стр. 229-233.
dsp.AdaptiveLatticeFilter | dsp.AffineProjectionFilter | dsp.FastTransversalFilter | dsp.FilteredXLMSFilter | dsp.FIRFilter | dsp.FrequencyDomainFIRFilter | dsp.LMSFilter | dsp.RLSFilter