Пакет: vision.labeler.loading
Суперклассы: vision.labeler.loading.MultiSignalSource
Загрузите сигналы от источников последовательности облаков точек в приложение Lidar Labeler
The vision.labeler.loading.PointCloudSequenceSource класс создает интерфейс для загрузки сигнала из источника данных последовательности облаков точек в приложение Lidar Labeler. В диалоговом окне Select Point Cloud приложения, когда Source Type задано значение Point Cloud Sequence, этот класс управляет параметрами в этом диалоговом окне.
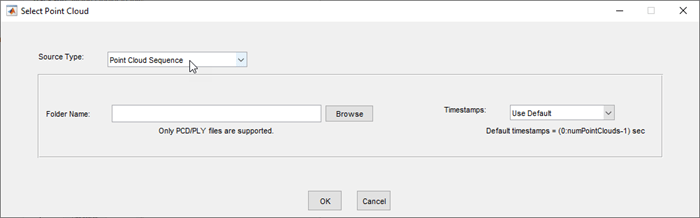
Чтобы получить доступ к этому диалоговому окну, в приложении выберите Import > Add Point Cloud.
Этот класс загружает последовательности облака точек, состоящие из файлов PCD или PLY.
The vision.labeler.loading.PointCloudSequenceSource класс является handle класс.
При экспорте меток из сеанса Lidar Labeler приложения, содержащего источник последовательности облака точек, экспортированные groundTruthLidar объект сохраняет образец этого класса в своем DataSource свойство.
Как создать PointCloudSequenceSource объект программно, например, когда программно создается groundTruthLidar объект, использовать vision.labeler.loading.PointCloudSequenceSource функция (описанная здесь).
pcSeqSource = vision.labeler.loading.PointCloudSequenceSourcePointCloudSequenceSource объект для загрузки сигнала из источника данных последовательности облака точек. Чтобы задать источник данных и параметры, необходимые для загрузки источника, используйте loadSource способ.
Укажите путь к папке, содержащей последовательность облака точек.
pcSeqFolder = fullfile(toolboxdir('vision'),'visiondata', ... 'pcdmapseq');
Создайте источник последовательности облаков точек. Для загрузки последовательности не существует отдельного файла временных меток, поэтому укажите исходные параметры как пустые. Загрузите путь к папке и пустые исходные параметры в PointCloudSequenceSource объект.
sourceName = pcSeqFolder; sourceParams = []; pcseqSource = vision.labeler.loading.PointCloudSequenceSource; loadSource(pcseqSource,sourceName,sourceParams)
Считайте первую систему координат в последовательности. Отобразите систему координат.
signalName = pcseqSource.SignalName; pc = readFrame(pcseqSource,signalName,1); figure pcshow(pc)

