Идентификация вращательных степеней свободы (DoFs) важна для создания и анализа приводной линии, особенно сложной системы со многими ограничениями и внешними приведениями. Simulink® представляет Число степеней свободы привода и другие переменные Simscape™ системы как состояния среди всех состояний модели, включая чистые состояния Simulink.
В этом разделе описывается, как идентифицировать Число степеней свободы привода, обработать ограничения и извлечь истинные или независимые Число степеней свободы из полной схемы привода.
Базовый элемент схемы привода:
Соединительные линии
Ограничения, включая ответвления
Динамические элементы
Датчики и источники
Привод приводов с источниками движения и запись движений с датчиками движения
Оконечные Число степеней свободы
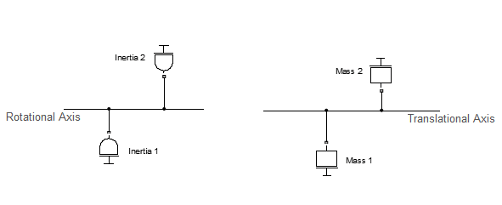
В модели Simscape Driveline™ механические движения могут быть вращательными или поступательными: движение вокруг или вдоль одной оси. Самый простой способ идентифицировать степень свободы привода (DoF) - это угловая или линейная скорость. Степень свободы представляет одинарную, отличную угловую или линейную скорость. Каждый Степень свободы реагирует на крутящие моменты и силы, действующие на инерцию и массы, составляющие приводную линию. Интегрирование уравнений движения Ньютона определяет угловое и линейное движения. Механические числа степеней свободы являются свойствами вращающихся инерций и поступательных масс. Тем не менее, непротиворечиво и проще идентифицировать одну Степень свободы Simscape Driveline как ось привода с ее связанными инерциями и массами.
Чтобы идентифицировать и подсчитать Число степеней свободы на приводной линии, сначала посмотрите на схему Simscape Driveline, начиная с ее механических линий соединения, прежде чем рассматривать ее блоки. Блоки привода изменяют Число степеней свободы, представленную соединительными линиями:
Генерирование крутящих моментов и сил, которые действуют относительно между осями привода
Добавление ограничений между осями привода
Навязывание крутящих моментов, сил и движений, приводимых в действие извне
Основные правила подключения линий и портов см. в разделе Создание модели Ходовой части.
Основной модуль движения привода является Степенью свободы, представленной неразрывной механической линией соединения. Такие линии представляют идеализированные безмассовые и идеально жесткие оси привода.
Представленные блоками Inertia, вращающиеся тела с инерцией жестко прикреплены и вращаются своими осями. Представленные блоками Mass, поступательные тела с массами жестко прикреплены и перемещаются вдоль своих осей. Одна соединительная линия или набор разветвленных соединительных линий представляют вращательное или поступательное движение и должны быть соединены с вращательными или поступательными портами.
Соединительная линия, привязанная портами разъема физической сети![]() , представляет идеализированную ось привода. Соединительная линия налагает ограничение, что два связанных компонента привода вращаются или перемещаются с одной и той же угловой или линейной скоростью, соответственно.
, представляет идеализированную ось привода. Соединительная линия налагает ограничение, что два связанных компонента привода вращаются или перемещаются с одной и той же угловой или линейной скоростью, соответственно.
![]()
Вы измеряете угловую или линейную скорость оси с помощью Ideal Rotational Motion Sensor или Ideal Translational Motion Sensor блока.
Определение относительных и абсолютных углов и положений. Относительный угол или положение иногда необходимы для вычисления внутренних крутящих моментов или сил между парами осей (см. «Определение связанных степеней свободы»). Чтобы определить относительный угол или положение, блок датчика движения интегрирует относительную угловую или линейную скорость пары осей и добавляет результат к начальному относительному углу или положению, заданному в диалоговом окне блока.
Можно задать абсолютный угол поворота или положение перемещения для одной оси, когда вы измеряете его движение с помощью датчика движения, соединяющего другой порт физического соединения датчика с Mechanical Rotational Reference или Mechanical Translational Reference. Датчик задает абсолютный угол или положение путем интегрирования скорости оси и добавления абсолютного опорного угла или положения, которые вы обеспечиваете в диалоговом окне датчика движения.
Вы не можете подвергнуть соединительную линию привода, сама по себе, каким-либо крутящим моментам или силам, потому что в ней отсутствует инерция или масса. Другой базовый элемент для создания функционирующей модели привода - это один или несколько блоков Inertia, один или несколько блоков Mass или оба. В реальной механической системе вращающиеся (или скользящие) тела несут как инерцию (или массу), так и Число степеней свободы.
Вы присоединяете Инерцию и Массы к механическим линиям соединения путем ответвления линий. Присоединенные инерции или массы подвержены любому крутящему моменту или силе, передаваемым соединительной линией. Соединительная линия накладывает ограничение, что все, что присоединено к одной линии, должно быть вращающимся или скользящим с той же скоростью.
Можно ответвить соединительные линии. Можно подключить конец любой ветви линии соединения привода![]() только к механическому порту соединения. Набор неразорванных разветвленных линий соединения представляет одну Степень свободы.
только к механическому порту соединения. Набор неразорванных разветвленных линий соединения представляет одну Степень свободы.
Разветвленные линии соединения и скорости вращения
Можно соединить две независимые оси привода, представляющие две независимые степени свободы (DoFs), внутренним динамическим элементом. Динамический элемент генерирует крутящий момент или силу от относительного угла, положения или движения двух осей. Этот крутящий момент или сила действуют между двумя осями, которые остаются независимыми Число степеней свободы, и которые передают крутящий момент или силу к их соответствующим присоединенным инерциям или массам.
Помимо передач, большинство библиотечных блоков Simscape Driveline являются динамическими элементами, равно как и механические вращательные и поступательные блоки библиотеки Simscape Foundation. Эти блоки генерируют внутренние крутящие моменты и силы. На блок с двумя механическими портами прикладывается один крутящий момент или сила с положительным знаком к одной оси и отрицательным знаком к другой оси. На этом рисунке крутящий момент прикладывается одинаково и противоположно к оси штока и корпуса торсионной пружины-демпфера.
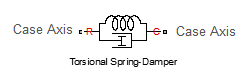
На блоках с более чем двумя механическими портами, общие крутящие моменты или силы, вытекающие из блока, все еще равны нулю, но крутящий момент или сила разделены между портами более комплексным способом, который зависит от динамики привода.
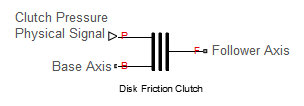
Муфта или элемент, подобный муфте, является условным или динамическим ограничением.
При разблокировке муфта соединяет две оси привода и может накладывать относительный крутящий момент между ними, оставляя две оси независимыми. Разблокированная муфта либо не сцепляется, не прикладывая крутящего момента вообще; или в зацеплении, наложение кинетического трения как функции от относительной скорости двух связанных осей.
Если муфта блокирует и применяет только статическое трение между двумя соединенными осями, две оси больше не являются независимыми. Вместо этого они выступают как единая ось, вращаясь с той же скоростью. См. «Определение ограниченных степеней свободы».
Несколько других, похожих на сцепление блоков также имеют блокировку и разблокировку Трение Кулона:
Некоторые элементы привода соединяют оси привода таким образом, чтобы исключить их свободу перемещаться независимо. Такие элементы накладывают ограничения на движения соединенных осей. Ограниченная ось больше не является независимой от других осей и не рассчитывает на общую сеть или независимые движения приводной линии. Такие ограничения удаляют из системы независимые степени свободы (DoFs).
Не все ограничения являются независимыми. Закрытие разветвленных линий соединения в циклы делает некоторые ограничения в циклах избыточными. Количество эффективных или независимых ограничений является количеством ограничений, возникающих из блоков минус количество независимых замкнутых циклов линии привода.
За исключением муфт и элементов, подобных муфте, ограничения привода являются безусловными или статическими ограничениями; то есть без изменений во время симуляции.
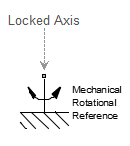
Соединение линии соединения привода к Mechanical Rotational Reference или Mechanical Translational Reference блоку замораживает движение соответствующей оси привода. Он не может двигаться, и его угловая или линейная скорость ограничена нулем во время симуляции. Такая ось не имеет связанного независимого Степень свободы.
Пока условия для блокировки действительны, заблокированная муфта или элемент, подобный муфте, ограничивает две соединенные оси привода, чтобы вращаться или скользить вместе. Две оси остаются различными, но только одна представляет независимую Степень свободы. Другой - зависимый.
Даже если он продолжает прикладывать кинетическое трение между осями, разблокированная муфта или элемент, подобный муфте, больше не накладывает ограничения. Вместо этого он действует как динамический элемент. См. «Определение связанных степеней свободы».
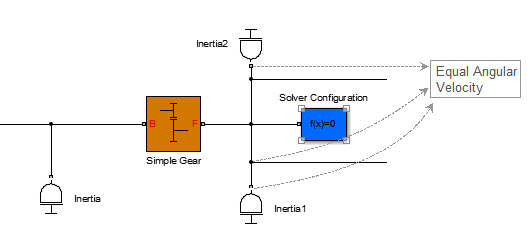
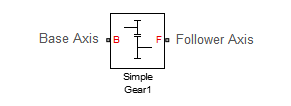
Зубчатая связь между двумя или несколькими осями привода уменьшает независимые числа степеней свободы привода путем наложения ограничений. Характер этих ограничений зависит от используемой передачи. Зубчатые блоки с двумя связанными осями накладывают одно такое ограничение и сводят две оси к одной независимой Степень свободы.
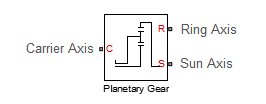
Многоосевые передачи накладывают больше одного ограничения. Для примера планетарная передача накладывает два ограничения на три оси, сводя оси к одной независимой Степени свободы. (Это число не включает четвертый, внутренний Степень свободы, планетарное колесо, которое не соединяется с осью с механическим портом.)
Фактическим количеством ограничений для определения количества чисел степеней свободы является количество эффективных или независимых ограничений. Когда соединительные линии образуют замкнутые циклы, будьте осторожны при подсчете ограничений в схеме привода. Наличие замкнутых циклов в схеме уменьшает эффективное количество ограничений, делая некоторые ограничения избыточными:
N constr = N bconstr - N цикл
| N constr | Количество независимых ограничений |
| N bconstr | Количество ограничений из блоков |
| N цикл | Количество независимых циклов |
Можно надежно подсчитать количество независимых циклов путем подсчета фундаментальных циклов. Фундаментальные циклы не имеют подциклов. Можно проследить основной цикл только с одним путем. Путем подсчета только фундаментальных циклов, вы избегаете перерасчета циклов, которые перекрываются.
Для примера эта схема имеет два независимых контура.
На этой схеме можно нарисовать три циклов: два внутренних циклов, левый и правый и внешний контур. Внешний контур охватывает оба внутренних циклов.
В этой схеме есть два независимых цикла, потому что только два являются фундаментальными. Внешний контур не принципиален.
Согласованность ограничений. Пока все скорости, ограниченные точками ветви линии, равны по всему циклу, замкнутый контур отображает избыточное одно из ограничений, содержащихся в нем. (См. Раздел «Правила ветвления осей привода и ограничения».) Скорости, не соединенные непосредственно линиями, также должны быть одинаковыми, если, например, они передаются через передачи.
Если скорости по замкнутому циклу не могут быть одинаковыми, приводная линия переопределяется и не может перемещаться.
Можно использовать Simscape Driveline и связанные блоки только с одним портом соединителя привода![]() , чтобы инициировать или завершить линию физического соединения. Разрыв линии соединения ограничивает Степень свободы.
, чтобы инициировать или завершить линию физического соединения. Разрыв линии соединения ограничивает Степень свободы.
Такие блоки включают:
Inertia и Mass, которые принимают крутящий момент и силу и отвечают ускорением.
Mechanical Rotational Reference и Mechanical Translational Reference, которые зондируют Число степеней свободы до нулевой скорости.
Vehicle Body, который неявно соединяет приводную линию с землей.
Эти блоки не должны заканчивать соединительную линию, а могут быть разветвлены от соединительной линии.
Линии соединения привода не имеют неотъемлемой направленности. Направление движения и крутящий момент определяются динамикой привода при симуляции модели.
Соединение Ideal Torque Source или Ideal Force Source с линией соединения привода добавляет крутящий момент или силу, заданную входом физического сигнала, в эту ось привода. Такое приведение в действие не влияет на количество систем DoFs. Оси привода передают крутящие моменты и силы к их соединенным Инерциям и Массам. Приводная линия свободно реагирует на эти навязанные крутящие моменты или силы. Движение моделируется путем интегрирования ускорений привода (результат наложенных крутящих моментов и сил), чтобы получить скорости привода.
Соединение Ideal Angular Velocity Source или Ideal Translational Velocity Source к оси привода удаляет свободу этой оси реагировать на крутящие моменты или силы. Вместо этого он задает движение оси во время симуляции от входа приводящего физического сигнала. В отличие от приведения в действие крутящего момента, приведение в действие движения удаляет из системы независимую степень свободы.
Для получения дополнительной информации о приведении в действие привода с крутящими моментами, силами и движениями, см. «Приведение в действие привода».
Чтобы определить количество независимых степеней свободы (DoFs) в вашем приводе:
Отсчитайте все непрерывные, бесперебойные линии соединения привода (группировка связанных наборов разветвленных линий) в части Simscape Driveline вашей диаграммы модели. Вызовите общее количество таких линий N CL.
Эти линии соединяют два порта соединителя привода или заканчиваются одним портом механического соединителя. ![]() Для получения дополнительной информации смотрите Задать фундаментальные степени свободы и привести в действие, чувствовать и прекратить степени свободы.
Для получения дополнительной информации смотрите Задать фундаментальные степени свободы и привести в действие, чувствовать и прекратить степени свободы.
Отсчитайте все ограничения, возникающие из блоков, которые накладывают ограничения на их соединенные оси привода. Вызовите общую сумму таких ограничений N bconstr.
Обычно каждый такой блок накладывает одно ограничение, но сложные передачи накладывают больше единицы. Для получения дополнительной информации смотрите Задать ограниченные степени свободы.
Подсчитайте количество независимых циклов, N цикл. Эффективное количество ограничений - N constr = N bconstr - N цикл. Для получения дополнительной информации смотрите Замкнутые циклы, Эффективные ограничения и Согласованность ограничений.
Подсчитайте все приведения в действие движения на приводной линии путем подсчета каждого исходного блока движения. Вызовите общее количество таких приведений в действие N mact. Для получения дополнительной информации смотрите Приведение в действие, Определение и Прекращение степеней свободы.
Число N DoF независимых чисел степеней свободы в вашем приводе:
N Степень свободы = N CL - N constr - N mact = N CL - [N bconstr - N цикл] - N mact
Необходимым (хотя и не достаточным) условием для движения привода и успешной симуляции привода является то, что N Степень свободы положителен. Отсчитывайте вращательные и поступательные числа степеней свободы отдельно.
В отличие от других компонентов привода, муфты и элементы, подобные сцеплению, могут подвергаться прерывистому изменению состояния во время симуляции. В целом, количество независимых чисел степеней свободы привода не является постоянным во время его движения. Каждое изменение состояния одной или нескольких муфт изменяет независимое количество Степень свободы. Взятые в целом, различные коллективные состояния муфт приводной линии могут иметь разное общее значение число степеней свободы. Чтобы полностью понять линию привода, исследуйте каждое возможное коллективное состояние ее состояний муфты, чтобы идентифицировать ее независимые Число степеней свободы и, возможно, недопустимые строения.
Рассмотрим модель двухскоростной коробки передач sdl_transmission_2spd.
Простая коробка передач
![]()
Эта система имеет пять очевидных чисел степеней свободы, представленных этими осями привода:
Разветвленная ось с блоком Inertia Drive Shaft
Разветвленная ось с блоком Inertia Output Shaft
Ось, соединяющая блок муфты высокой передачи (муфта для расписания высокой муфты) с блоком Gear High
Ось, соединяющая блок сцепления с низкой передачей (муфта для расписания низких сцеплений) с блоком Gear Low
Ось, соединяющая блок Futch Brake с блоком Mechanical Rotational Reference (вращательная земля)
Имеется очевидный замкнутый цикл, образованный блоками зубчатой передачи и блоками зубчатой муфты. Этот цикл действителен, только если оба блока сцепления шестерни заблокированы.
Фактическое количество независимых чисел степеней свободы зависит от состояния муфт. Модель не имеет источников движения, поэтому нам нужно рассматривать только передачи и сцепления как ограничения:
Два блока зубчатых колес всегда действуют, что приводит к двум постоянно существующим ограничениям.
Пятая ось всегда соединяется с корпусом (вращательное заземление).
Эти три ограничения сокращают пять чисел степеней свободы до двух чисел степеней свободы.
А теперь рассмотрим муфты.
Сначала рассмотрим случай, когда блок Mutch Brake отключен (бесплатно).
Если и блоки сцепления с высокой передачей, и блоки сцепления с низкой передачей разблокированы, то система имеет два независимых Числа степеней свободы, один слева от блоков сцепления с шестерней, а другой между блоками сцепления с шестерней и блоком тормоза сцепления.
Если один из этих блоков зубчатой муфты заблокирован, дополнительное ограничение сводит систему к одному независимому Степень свободы, все слева от блока Futch Brake. (График управления сцеплением настраивается таким образом, чтобы предотвратить блокировку обоих этих блоков сцепления одновременно.)
Если блок Futch Brake включен, график управления сцеплением делает два блока сцепления отключенными.
Если блок Futch Brake разблокирован, приводная линия имеет два независимых Числа степеней свободы: слева от блоков сцепления и между блоками сцепления и блоком Futch Brake.
Если блок Futch Brake заблокирован, система уменьшается до одного Степень свободы, слева от блоков сцепления шестерни. Все справа от блоков сцепления привода заблокировано на корпусе.
Эта таблица и абстрактная схема результируют возможности, доступные в этой модели.
| Включение тормозов | Блокировка муфты | Независимые Число степеней свободы |
|---|---|---|
| Тормоз отключен | Оба блока сцепления шестерни разблокированы | Два: Слева и справа от блоков сцепления шестерни |
| Один блок зубчатой муфты заблокирован | Первый: Слева от блока Mutch Brake | |
| Тормоз включен | Блок Тормоза разблокирован | Два: Слева и справа от блоков сцепления шестерни |
| Сцепление Тормозной блок заблокирован | Один: слева от блоков сцепления шестерни |
Степени свободы в простой трансмиссии
![]()
Проект расписания сцепления, реализованный в Подсистеме расписания сцепления, исключает нефизические строения. Стоит их все равно рассмотреть, ради полного понимания проекта привода. Для получения дополнительной информации о проблемах сцепления см. «Устранение проблем моделирования привода и симуляции» и «Передачи моделирования».
Обе коробки передач заблокированы, Тормоз сцепления разблокирован. Это строение создаёт конфликт Число степеней свободы и сводит независимые Число степеней свободы к единому. Ось привода справа от блоков сцепления шестерни пытается вращаться с двумя различными скоростями, как того требуют два разных передаточных числа. Две заблокированные муфты налагают два дополнительных ограничения на два оставшихся Числа степеней свободы, но образуют замкнутый цикл, номинально оставляя одну свободу в механизме. Из-за конфликта Степень свободы попытка моделирования такого строения приводит к ошибке Simscape Driveline.
Если бы две Передачи имели одинаковые передаточные числа, Число степеней свободы не конфликтовал бы, и симуляция выполнялась бы без ошибок.
Одно сцепление с шестерней заблокировано, сцепление с тормозом заблокировано. Это строение также создаёт конфликт Число степеней свободы и приводит к нулю Число степеней свободы. Две заблокированные муфты налагают два дополнительных ограничения на два оставшихся Числа степеней свободы и не оставляют свободы в механизме. Управляемая осью привода налево, ось привода между блоками сцепления шестерни пытается вращаться, но оказывается заблокированной к Механической Ссылке. Попытка симулировать такое строение приводит к ошибке Simscape Driveline.
Обе зубчатые муфты заблокированы, тормоза сцепления заблокированы. Это строение также является избыточной. Три заблокированные муфты налагают два эффективных ограничения на оставшиеся два Числа степеней свободы (после учета замкнутого цикла) и дают N Степень свободы = 0. В сложение ось привода справа от блоков сцепления шестерни пытается вращаться с двумя различными ненулевыми скоростями, оставаясь заблокированной к Механической Поворотной Ссылке, создавая две различные Степени свободы конфликта.
