Выполните цикл на фиксированной частоте
The rosrate объект использует rateControl (Robotics System Toolbox) суперкласс, чтобы наследовать большинство его свойств и методов. Главное различие в том, что rateControl использует узел ROS в качестве источника информации о времени. Поэтому он может использовать симуляцию ROS или стенки тактовое время (см. IsSimulationTime свойство).
Если rosinit создает мастер ROS в MATLAB®глобальный узел использует стенку тактового сигнала.
Область эффективности rosrate объект и способность поддерживать DesiredRate значение зависит от публикации информации о часах в ROS.
Совет
Разрешение планирования вашей операционной системы и уровень другой системной активности могут повлиять на точность выполнения скорости. В результате точная синхронизация скорости ограничивается 100 Гц для выполнения кода MATLAB. Чтобы улучшить эффективность и скорость выполнения, используйте генерацию кода.
rate = rosrate(desiredRate)Rate объект, который позволяет вам выполнять цикл с фиксированной частотой, DesiredRate. Источник времени связан с источником времени глобального узла ROS, который требует, чтобы вы подключили MATLAB к сети ROS с помощью rosinit.
rate = ros.Rate(node,desiredRate)Rate объект, который управляет циклами с фиксированной скоростью на основе источника времени, связанного с указанным узлом ROS, node.
DesiredRate - Желаемая скорость выполненияЖелаемая скорость выполнения цикла, заданная как скаляр в герце. При использовании waitfor, цикл работает каждый DesiredRate секунд, если цикл не занимает больше времени. Затем он начинает следующий цикл на основе заданного OverRunAction.
DesiredPeriod - Желаемый период времени между казнямиЖелаемый период времени между выполнениями, заданный как скаляр в секундах. Это свойство равно обратной функции DesiredRate.
TotalElapsedTime - Прошло время после конструкции или сбросаПрошло время с момента конструкции или сброса, заданное как скаляр в секундах.
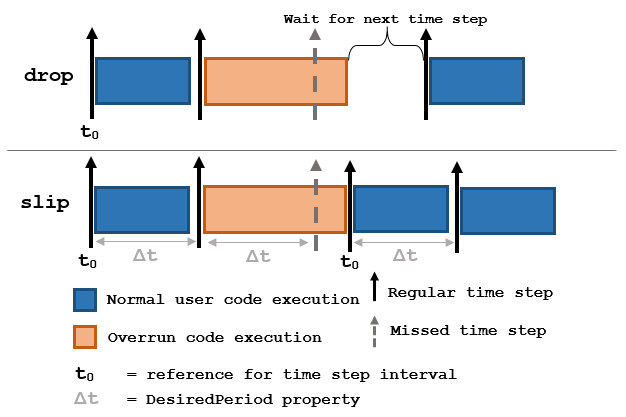
LastPeriod - Прошло время между двумя последними вызовами в waitforNaN (по умолчанию) | скаляромOverrunAction - Метод обработки переполнений'slip' (по умолчанию) | 'drop'Метод обработки переполнений, заданный как один из следующих векторов символов:
'drop' - ожидает до следующего временного интервала, равного кратному DesiredPeriod
'slip' - немедленно выполняет цикл снова
Каждая секция кода вызывает waitfor (Robotics System Toolbox) в конце выполнения.
IsSimulationTime - Индикатор, используется ли симуляция или настенный синхроимпульсtrue | falseИндикатор, используется ли симуляция или стенка тактовое время, возвращается как true или false. Если true, а Rate объект использует время симуляции ROS, чтобы регулировать скорость выполнения цикла.
waitfor | Приостановите выполнение кода, чтобы достичь желаемой скорости выполнения |
statistics | Статистика прошлых периодов выполнения |
reset | Сброс Rate объект |
