Карта порядок-об/мин анализа порядка
map = rpmordermap(x,fs,rpm)map, что является результатом выполнения анализа порядка для вектора входа, x. x измеряется в наборе rpm скорости вращения, выраженные в оборотах в минуту. fs - скорость выборки измерений в Гц. Каждый столбец map содержит среднеквадратичные (RMS) оценки амплитуды порядков, присутствующих на каждом rpm значение. rpmordermap производит повторную выборку x для постоянной частоты дискретизации за цикл и использует краткосрочное преобразование Фурье для анализа спектрального содержимого повторно дискретизированного сигнала.
map = rpmordermap(___,Name,Value)Name,Value пары в дополнение к входным параметрам в предыдущих синтаксисах.
rpmordermap(___) без выходных аргументов строит карту порядка как функцию скорости вращения и времени на интерактивном рисунке.
Создайте имитированный сигнал, дискретизированный на частоте 600 Гц в течение 5 секунд. Система, которая тестируется, увеличивает скорость вращения с 10 до 40 оборотов в секунду в течение периода наблюдения.
Сгенерируйте показания тахометра.
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
Сигнал состоит из четырех гармонически связанных щебета с порядками 1 , 0.5 , 4 и 6. Щебет порядка 4 имеет удвоенную амплитуду остальных. Чтобы сгенерировать щебет, используйте метод трапеций, чтобы выразить фазу как интеграл скорости вращения.
o1 = 1; o2 = 0.5; o3 = 4; o4 = 6; ph = 2*pi*cumtrapz(rpm/60)/fs; x = [1 1 2 1]*cos([o1 o2 o3 o4]'*ph);
Визуализируйте карту порядка-об/мин сигнала.
rpmordermap(x,fs,rpm)

Анализ моделируемых данных с акселерометра, размещенного в кабине вертолета.
Загрузите данные вертолета. Вибрационные измерения, vib, отбираются со скоростью 500 Гц в течение 10 секунд. Проверка данных показывает, что она имеет линейный тренд. Удалите тренд, чтобы предотвратить его ухудшение качества оценки порядка.
load('helidata.mat')
vib = detrend(vib);Постройте график нелинейного профиля скорости вращения. Ротор поднимается до тех пор, пока не достигнет максимальной скорости вращения около 27 600 оборотов в минуту, а затем прибегает вниз.
plot(t,rpm) xlabel('Time (s)') ylabel('RPM')

Вычислите карту order-RPM. Задайте разрешение порядка 0,015.
[map,order,rpmOut,time] = rpmordermap(vib,fs,rpm,0.015);
Визуализируйте карту.
imagesc(time,order,map) ax = gca; ax.YDir = 'normal'; xlabel('Time (s)') ylabel('Order')

Повторите расчет с использованием более мелкого разрешения порядка. Постройте график карты с помощью встроенной функциональности rpmordermap. Нижние порядки решаются более четко.
rpmordermap(vib,fs,rpm,0.005)

Сгенерируйте сигнал, который состоит из двух линейных щебета и квадратичного щебета, все дискретизированные на частоте 600 Гц в течение 5 секунд. Система, которая производит сигнал, увеличивает его скорость вращения с 10 до 40 оборотов в секунду в течение периода проверки.
Сгенерируйте показания тахометра.
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
Линейные щебеты имеют порядки 1 и 2.5. Компонент с порядком 1 имеет удвоенную амплитуду другого. Квадратичный щебет начинается с порядка 6 и возвращается к этому порядку в конце измерения. Его амплитуда составляет 0,8. Создайте сигнал с помощью этой информации.
o1 = 1; o2 = 2.5; o6 = 6; x = 2*chirp(t,o1*f0,t1,o1*f1)+chirp(t,o2*f0,t1,o2*f1) + ... 0.8*chirp(t,o6*f0,t1,o6*f1,'quadratic');
Вычислите карту порядка-об/мин сигнала. Используйте пиковую амплитуду в каждой камере измерения. Задайте разрешение 0,25 порядков. Окончите данные окном Чебышева, ослабление бокового колеса которого составляет 80 дБ.
[map,or,rp] = rpmordermap(x,fs,rpm,0.25, ... 'Amplitude','peak','Window',{'chebwin',80});
Нарисуйте карту order-RPM как график водопада.
[OR,RP] = meshgrid(or,rp); waterfall(OR,RP,map') view(-15,45) xlabel('Order') ylabel('RPM') zlabel('Amplitude')

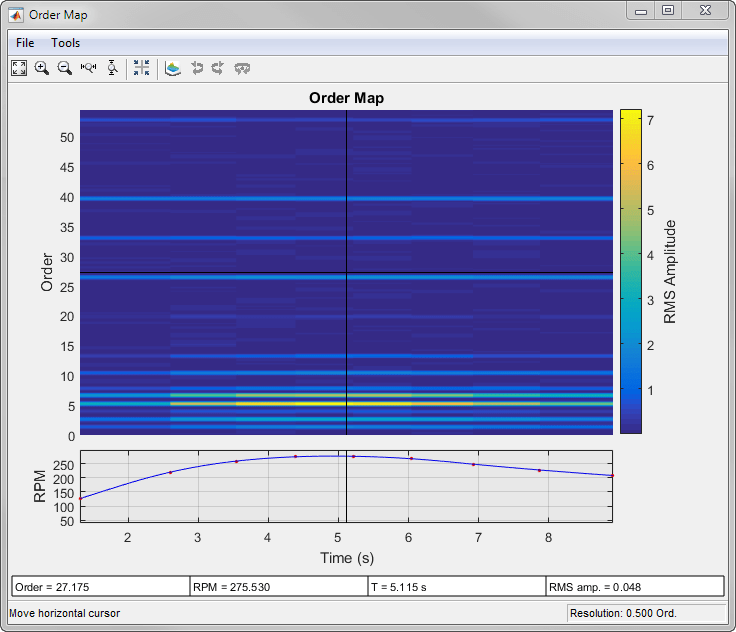
Постройте интерактивную карту order-RPM по телефону rpmordermap без выходных аргументов.
Загрузите файл helidata.mat, который содержит имитированные вибрационные данные с акселерометра, размещенного в кабине вертолета. Данные отбираются со скоростью 500 Гц в течение 10 секунд. Удалите линейный тренд в данных. Звонить rpmordermap чтобы сгенерировать интерактивный график карты order-RPM. Задайте разрешение порядка 0,005 порядков.
load helidata.mat
rpmordermap(detrend(vib),fs,rpm,0.005)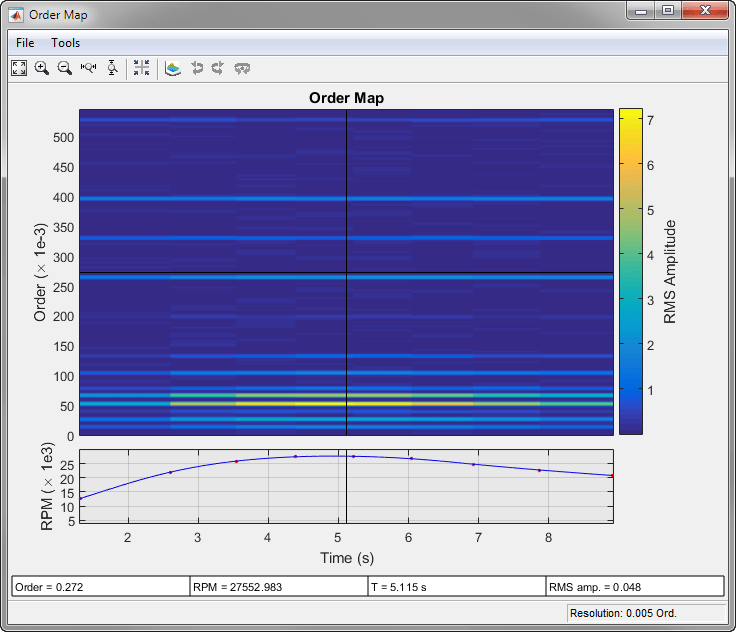
Более подробное описание графика RPM-vs.-time в нижней части рисунка см. в разделе Алгоритмы.
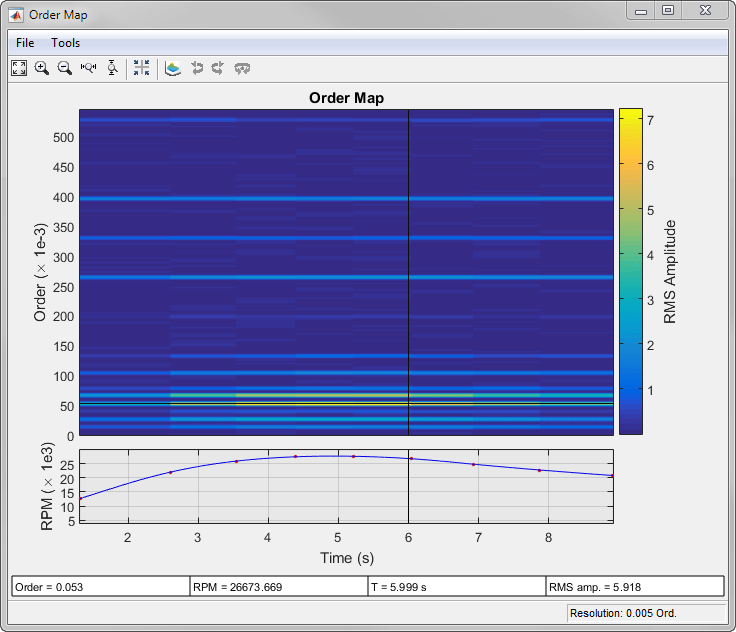
Переместите курсоры перекрестия на рисунке, чтобы определить частоту вращения и амплитуду RMS на порядке 0.053 через 6 секунд.
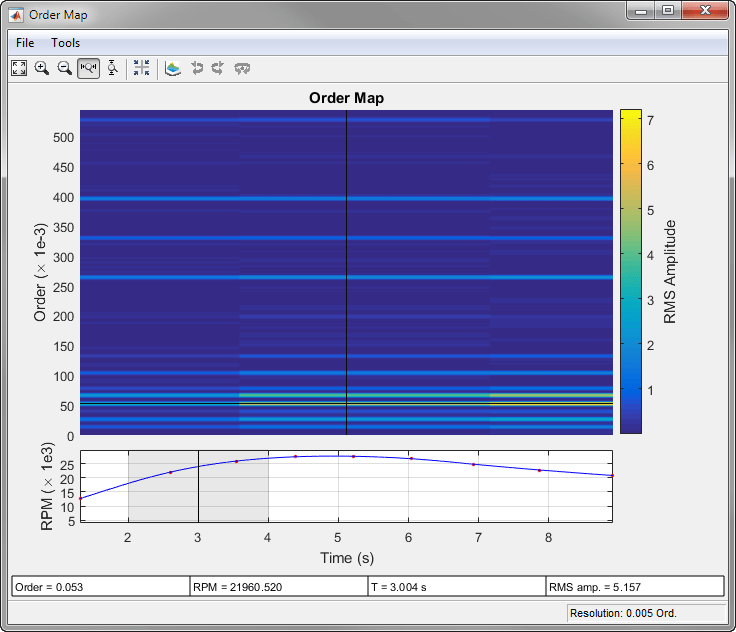
Нажмите кнопку Zoom X![]() на панели инструментов, чтобы изменить масштаб временной области между 2 и 4 секундами. Серый прямоугольник на графике RPM-vs.-tim. показывает необходимую область. Можно сдвинуть эту область, чтобы выполнить панорамирование во времени.
на панели инструментов, чтобы изменить масштаб временной области между 2 и 4 секундами. Серый прямоугольник на графике RPM-vs.-tim. показывает необходимую область. Можно сдвинуть эту область, чтобы выполнить панорамирование во времени.
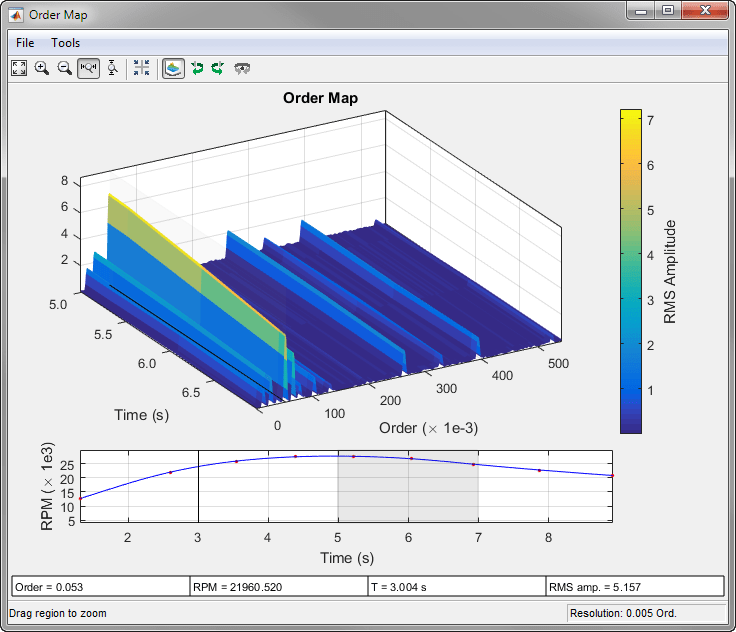
Нажмите кнопку Waterfall Plot![]() , чтобы отобразить карту order-RPM как график водопада. Для улучшения видимости поверните график по часовой стрелке с помощью кнопки Rotate Left
, чтобы отобразить карту order-RPM как график водопада. Для улучшения видимости поверните график по часовой стрелке с помощью кнопки Rotate Left![]() три раза. Переместите панораму на интервал между 5 и 7 секундами.
три раза. Переместите панораму на интервал между 5 и 7 секундами.
Анализ порядка - это исследование вибраций во вращающихся системах, которые являются результатом самого вращения. Частоты этих колебаний часто пропорциональны скорости вращения. Константы пропорциональности являются порядками.
Скорость вращения обычно измеряется независимо и изменяется со временем в большинстве экспериментальных условий. Правильный анализ вызванных вращением вибраций требует повторной дискретизации и интерполяции измеренного сигнала, чтобы достичь постоянного количества выборок за цикл. Посредством этого процесса компоненты сигнала, частоты которых являются постоянными, преобразуются в постоянные тональные сигналы. Преобразование уменьшает мазок спектральных компонентов, который происходит, когда частота изменяется быстро со временем.
rpmordermap функция выполняет следующие шаги:
Использование cumtrapz для оценки угла фазы как временного интеграла скорости вращения:
Использование resample для повышения частоты и lowpass-фильтрации сигнала. Этот шаг позволяет функции интерполировать сигнал в незащищенных временных точках без сглаживания высокочастотных компонентов. rpmordermap увеличивает частоту сигнала в 15 раз.
Использование interp1 для интерполяции сигнала с повышенной дискретизацией линейно на равномерную сетку в фазовой области. Самый высокий доступный порядок в измерении фиксируется частотой дискретизации и самой высокой скоростью вращения, достигнутой системой:
Чтобы точно захватить этот самый высокий порядок, необходимо дискретизировать сигнал как минимум в два раза O максимум. Для лучших результатов ,rpmordermap сверхвыборки в дополнительном множителе 4. Результирующая частота выборки в фазовой области, fp,
Разрешение порядка по умолчанию, r, является
Использование spectrogram вычислить краткосрочное преобразование Фурье (STFT) интерполированного сигнала. По умолчанию функция разделяет сигнал на L сегментов -samples и окон каждый из них с плоским верхним окном. Есть
выборки перекрытия между смежными сегментами, где p перекрытие задается с помощью 'OverlapPercent' Пары "имя-значение" по умолчанию равны 50%. Длина ДПФ устанавливается равной L. Разрешение связано с частотой дискретизации и длиной сегмента
где k - эквивалентная шумовая полоса окна, реализованная в enbw. Настройте разрешение, чтобы дифференцировать тесно расположенные порядки. Меньшие значения r требуют больших длин сегментов. Если вам нужно достичь заданного разрешения, убедитесь, что ваш сигнал имеет достаточно выборок.
Красные точки на графике RPM-vs.-time в нижней части интерактивного графика rpmordermap окно соответствует правому ребру каждого оконного сегмента. Синяя линия на графике является сигналом RPM, нарисованным как функция времени:
[1] Брандт, Андерс. Анализ шума и вибрации: анализ сигналов и экспериментальные процедуры. Chichester, UK: John Wiley & Sons, 2011.
orderspectrum | ordertrack | orderwaveform | rpmfreqmap | rpmtrack | spectrogram | tachorpm
