Datastore для данных метки ограничивающего прямоугольника
The boxLabelDatastore создает хранилище данных для данных меток ограничивающих прямоугольников. Используйте этот объект для чтения маркированных данных ограничивающего прямоугольника для обнаружения объектов.
Чтение данных меток ограничивающих прямоугольников из boxLabelDatastore объект, использовать read функция. Эта функция объекта возвращает массив ячеек с двумя или тремя столбцами. Можно создать datastore, которое объединяет boxLabelDatastore объект со ImageDatastore использование объекта combine функция объекта. Используйте комбинированный datastore для обучения детекторов объектов с помощью таких функций обучения, как trainYOLOv2ObjectDetector и trainFasterRCNNObjectDetector. Вы можете получить доступ к данным в datastore и управлять ими, используя функции объекта. Как изменить ReadSize свойство, вы можете использовать запись через точку.
blds = boxLabelDatastore(tbl1,...,tbln)boxLabelDatastore объект из одной или нескольких таблиц, содержащих маркированные данные ограничивающего прямоугольника.
tbl1,...,tbln - Маркированные данные ограничивающего прямоугольника (как отдельные аргументы)Маркированные данные ограничивающего прямоугольника, заданные как таблица с одним или несколькими столбцами. Каждая таблица соответствует набору меток. Ограничивающие прямоугольники могут быть выровнены по оси, повернутыми прямоугольниками или кубоидами. В таблице ниже описан формат ограничивающих рамок.
| Ограничительный прямоугольник | Описание |
|---|---|
| Выровненный по оси прямоугольник |
Определенный в пикселе координирует как <reservedrangesplaceholder4>-by-4 числовая матрица со строками формы [<reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reservedrangesplaceholder0>], где:
|
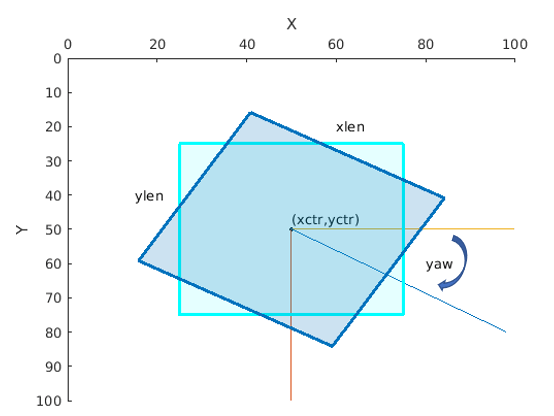
| Повернутый прямоугольник |
Определенный в пространственных координатах как <reservedrangesplaceholder5>-by-5 числовая матрица со строками формы [<<reservedrangesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reserved angesplaceholder0>] , где:
|
| Cuboid |
Определенный в пространственных координатах как <reservedrangesplaceholder9>-by-9 числовая матрица со строками формы [<<reservedrangesplaceholder8> <reservedrangesplaceholder7> <reservedrangesplaceholder6> <reservedrangesplaceholder5> <reserved angesplaceholder4> <reservedrangesplaceholder3> <reservedrangesplaceholder2> <reservedrangesplaceholder1> <reservedrangesplace holder0>] , где:
Рисунок показывает, как эти значения определяют положение кубоида.
|
Таблица с одним или несколькими столбцами:
Все столбцы содержат ограничительные рамки. Каждый столбец должен быть вектором камеры, содержащим M -by - N матрицы. M - это количество изображений, а N представляет один класс объектов, такой как stopSign, carRear или carFront.
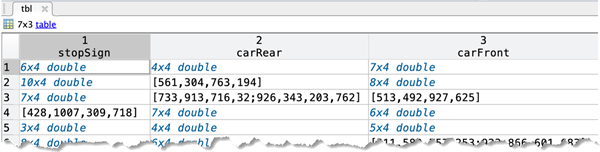
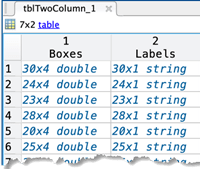
Таблица с двумя столбцами.
Первый столбец содержит ограничительные рамки. Второй столбец должен быть вектором камер, который содержит имена меток, соответствующие каждому ограничивающему прямоугольнику. Каждый элемент вектора камеры должен быть M-на-1 категориальным или строковым вектором, где M представляет количество меток.
Чтобы создать таблицу основной истины, используйте Image Labeler или Video Labeler приложение. Чтобы создать таблицу обучающих данных из сгенерированной основной истины, используйте objectDetectorTrainingData функция.
Типы данных: table
bSet - Расположение блоковblockLocationSet объектРасположения блоков, заданные как blockLocationSet объект. Вы можете создать этот объект при помощи balanceBoxLabels функция.
combine | Объедините данные из нескольких хранилищ данных |
countEachLabel | Количество вхождений меток пикселей или коробок |
hasdata | Определите, доступны ли данные для чтения из datastore |
numpartitions | Количество разделов для datastore |
partition | Разделите метку datastore |
preview | Чтение первой строки данных в datastore |
progress | Процент данных, считанных из datastore |
read | Чтение данных из datastore |
readall | Чтение всех данных в datastore |
reset | Сбросьте datastore в начальное состояние |
shuffle | Возврат перемещенной версии datastore |
subset | Создайте подмножество datastore или набора файлов |
transform | Преобразуйте datastore |
isPartitionable | Определите, является ли datastore разделяемым |
isShuffleable | Определите, является ли datastore shuffleable |
balanceBoxLabels | estimateAnchorBoxes | yolov2Layers | analyzeNetwork (Deep Learning Toolbox)