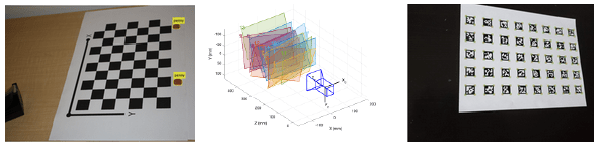
Camera calibration является процессом оценки параметров камеры при помощи изображений, которые содержат калибровочный шаблон. Параметры включают внутренние параметры камеры, коэффициенты искажения и значения внешних параметров камеры. Используйте эти параметры камеры, чтобы удалить эффекты искажения объектива из изображения, измерить плоские объекты, восстановить 3-D сцены из нескольких камер и выполнить другие приложения компьютерного зрения.
Используйте приложение Camera Calibrator и функции, чтобы оценить один внутренние параметры камеры, значения внешних параметров и параметры искажения объектива.
Используйте приложение Stereo Camera Calibrator и функции, чтобы оценить параметры и относительные положения и ориентации обеих камер в паре стереофотоаппарата. Можно затем использовать камеру, чтобы восстановить глубину с изображений. Это также вычисляет положение и ориентацию второй камеры относительно первой камеры.
| Camera Calibrator | Оцените геометрические параметры одной камеры |
| Stereo Camera Calibrator | Оцените геометрические параметры стереофотоаппарата |
Что такое калибровка фотоаппарата?
Оцените параметры объектива и датчика изображения картинки или видеокамеры.
Калибровочные основы подозрительного взгляда
Модель fisheye-камеры и калибровка в MATLAB.
Используя одно приложение Camera Calibrator
Оцените внутренние параметры камеры, значения внешних параметров и параметры искажения объектива.
Используя приложение Stereo Camera Calibrator
Калибруйте стереофотоаппарат, который можно затем использовать, чтобы восстановить глубину с изображений.
Укажите индексы пикселей, пространственные координаты и трехмерные системы координат
Выберите функции, которые возвращают и принимают объекты точек для нескольких типов функций




