Добавьте пары изображений и выберите модель камеры
Чтобы начать калибровку, необходимо добавить изображения. Можно добавить сохраненные образы из папки или добавить изображения непосредственно из камеры. Калибратор анализирует изображения, чтобы гарантировать, что они удовлетворяют требования калибратора. Калибратор затем обнаруживает точки на шаблоне. Для получения дополнительной информации на настройке камеры и получающих изображениях, смотрите, Готовят Изображения Камеры и Получения
 Добавьте изображения из файла
Добавьте изображения из файла
На вкладке Calibration, в разделе File, нажимают Add Images, и затем выбирают From file. Можно добавить изображения из нескольких папок путем нажатия на Add images для каждой папки. Введите местоположение для изображений, соответствующих камере 1, или выберите его с помощью кнопки Browse, и затем сделайте то же самое для камеры 2. Задайте калибровочный шаблон путем выбора один из списка Choose Pattern, или, в разделе Custom Pattern, выберите Import Pattern Detector. В разделе Properties задайте свойства для своего детектора, и затем выберите OK, чтобы добавить ваши изображения.
После того, как вы загрузите изображения, диалоговое окно Image and Pattern Properties появляется. Прежде чем калибратор может анализировать калибровочные шаблоны, необходимо выбрать калибровочный шаблон, чтобы обнаружить и установить свойства изображения для структуры шаблона. Для получения дополнительной информации об этом диалоговом окне смотрите Select Calibration Pattern and Set Properties.
Анализируйте изображения
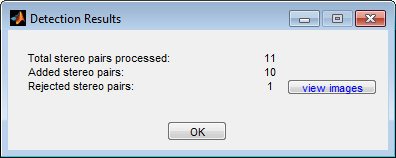
Калибратор пытается обнаружить шаблон в каждой из добавленных стереопар, отображая окно индикатора выполнения, указывая на прогресс обнаружения. Если какое-либо из изображений отклоняется, диалоговое окно Detection Results появляется, который содержит диагностическую информацию. Результаты показывают, сколько общих изображений было обработано, и обработанных, сколько было принято, отклонено или пропущено. Калибратор пропускает дублирующиеся изображения.
Чтобы просмотреть отклоненные изображения, нажмите View images. Калибратор отклоняет дублирующиеся изображения. Это также отклоняет изображения, где целый шаблон не мог быть обнаружен. Возможные причины ни для какого обнаружения являются размытым изображением или экстремальным углом шаблона. Обнаружение занимает больше времени с увеличенными изображениями и с шаблонами, которые содержат большое количество квадратов.
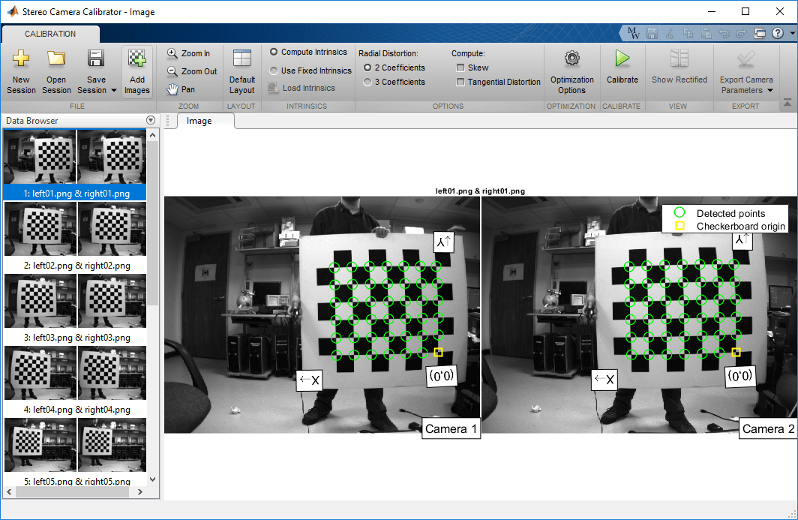
Просмотрите изображения и обнаруженные точки
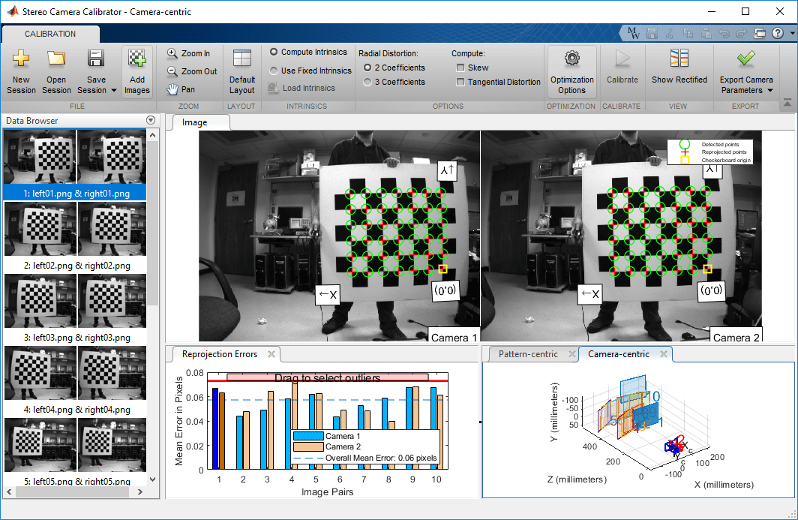
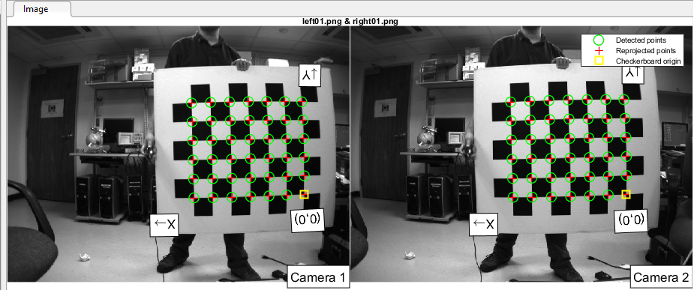
Панель Data Browser отображает список пар изображений с идентификаторами. Эти пары изображений содержат обнаруженный шаблон. Чтобы просмотреть изображение, выберите его из панели Data Browser.
Панель Image отображает выбранную пару изображений с зелеными кругами, чтобы указать на обнаруженные точки. Можно проверить, что углы были обнаружены правильно с помощью средств управления изменением масштаба. Желтый квадрат указывает (0,0) источник. X и стрелы Y указывают на ориентацию осей шаблона.
Внутренние параметры
Можно принять решение для приложения вычислить внутренние параметры камеры, или можно загрузить предварительно вычисленные, зафиксированные внутренние параметры. Чтобы загрузить внутренние параметры в приложение, на вкладке Calibration, в разделе Intrinsics, выбирают Use Fixed Intrinsics. Radial Distortion и опции Compute в разделе Options отключены, когда вы загружаете внутренние параметры.
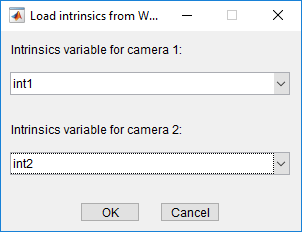
Чтобы загрузить внутренние параметры как переменные из вашей рабочей области, выберите Load Intrinsics. Например, если wideBaselineStereo структура содержит внутренние параметры для обеих камер, введите этот код в командной строке MATLAB.
ld = load("wideBaselineStereo");
int1 = ld.intrinsics1
int2 = ld.intrinsics2
Затем выберите
Load Intrinsics, чтобы задать эти переменные во внутренних параметрах Загрузки от диалогового окна Workspace.
Калибровать
Если вы удовлетворены принятыми парами изображений, нажимаете кнопку Calibrate на вкладке Calibration. Калибровочные настройки по умолчанию принимают минимальный набор параметров камеры. Запустите путем выполнения калибровки с настройками по умолчанию. После оценки результатов можно попытаться улучшить калибровочную точность путем корректировки настроек и добавления или удаления изображений, и затем калибровать снова.
Оптимизация
Когда камера имеет серьезное искажение объектива, приложение может не вычислить начальные значения для внутренних параметров камеры. Если вы имеете технические требования производителя для своей камеры и знаете размер пикселя, фокусное расстояние или характеристики линзы, можно вручную установить исходные предположения для внутренних параметров камеры и радиального искажения. Чтобы установить исходные предположения, выберите Options> Optimization Options.
Выберите Specify initial intrinsics as a 3-by-3 matrix of the form [fx 0 0; s fy 0; cx cy 1], и затем введите 3х3 матрицу, чтобы задать начальные внутренние параметры. Если вы не задаете исходное предположение, функция вычисляет начальную внутреннюю матрицу с помощью линейного метода наименьших квадратов.
Выберите Specify initial radial distortion as 2- or 3-element vector, и затем введите 2-или вектор с 3 элементами, чтобы задать начальное радиальное искажение. Если вы не вводите значение, функция использует 0 как начальное значение для всех коэффициентов.
Для получения дополнительной информации о калибровочных параметрах смотрите то, Что Калибровка фотоаппарата?.
Оцените калибровочные результаты
Можно оценить калибровочную точность путем исследования ошибок перепроекции, исследования значений внешних параметров камеры или просмотра неискаженного изображения. Для лучших калибровочных результатов используйте все три метода оценки.
Исследуйте ошибки перепроекции
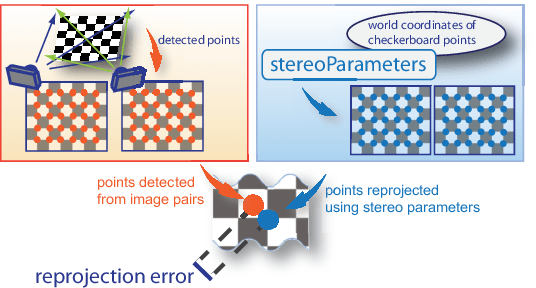
reprojection errors является расстояниями, в пикселях, между обнаруженным и повторно спроектированными точками. Приложение Stereo Camera Calibrator вычисляет ошибки перепроекции путем проектирования точек от мировых координат, заданных шаблоном, в координаты изображений. Приложение затем сравнивает повторно спроектированные точки с соответствующими обнаруженными точками. Как правило средние ошибки перепроекции меньше чем одного пикселя приемлемы.
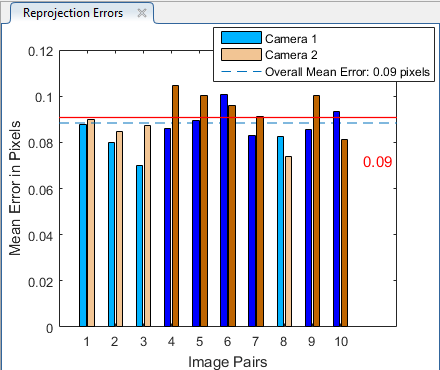
Отображения Stereo Calibration App, в пикселях, ошибки перепроекции как столбчатый график. График помогает вам идентифицировать, какие изображения, которые неблагоприятно способствуют калибровке. Выберите запись столбчатого графика и удалите изображение из списка изображений в панели Data Browser.
Ошибочный столбчатый график перепроекции
Столбчатый график отображает среднюю ошибку перепроекции на изображение, наряду с полной средней погрешностью. Метки панели соответствуют идентификаторам пары изображений. Подсвеченные панели соответствуют выбранной паре изображений.
Выберите пару изображений одним из этих способов:
Кликните по соответствующей панели в графике.
Выберите пару изображений из списка в панели Data Browser.
Настройте полную среднюю погрешность. Кликните и двигайте красную линию или вниз выбрать пары, содержащие изображение со средней погрешностью, больше, чем заданное значение.
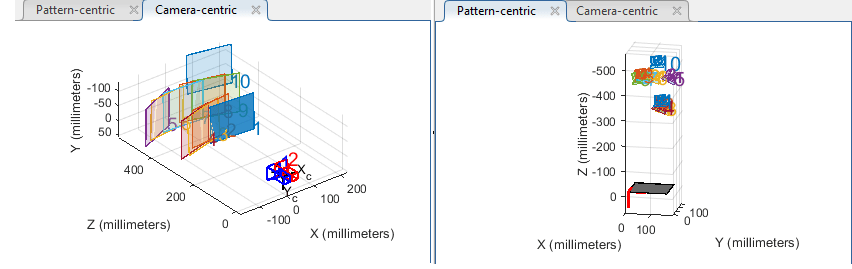
Исследуйте внешнюю визуализацию параметра
3-D внешний график параметров обеспечивает центральное камерой представление шаблонов и центральное шаблоном представление камеры. Центральное камерой представление полезно, если камера была стационарной, когда изображения были получены. Центральное шаблоном представление полезно, если шаблон был стационарным. Можно кликнуть по курсору и удерживать кнопку мыши с вращать значком, чтобы вращать фигуру. Кликните по шаблону (или камера) в отображении, чтобы выбрать его. Подсвеченные данные в визуализации соответствуют выбранной паре изображений в списке. Исследуйте относительные положения шаблона и камеры, чтобы определить, совпадают ли они с тем, что вы ожидаете. Например, шаблон, который появляется позади камеры, указывает на калибровочную ошибку.
Покажите исправленные изображения
Чтобы просмотреть эффекты исправления стерео, на вкладке Calibration, в разделе View, выбирают Show Rectified. Если калибровка точна, изображения становятся неискаженными и выровненными строкой.
Примечание
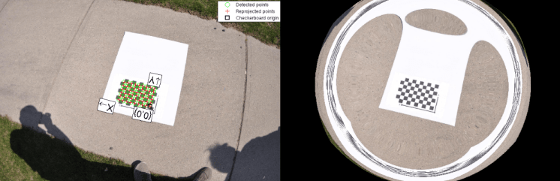
Проверка исправленных изображений важна, даже если ошибки перепроекции являются низкими. Например, если шаблон покрывает только небольшой процент изображения, оценка искажения может быть неправильной, даже при том, что калибровка привела к немногим, перепроекция errors.The после изображения показывает пример этого типа неправильной оценки для одной калибровки фотоаппарата.
Улучшите калибровку
Чтобы улучшить калибровку, можно удалить изображения высокой ошибки, добавить больше изображений или изменить настройки калибратора.
Рассмотрите добавление большего количества пар изображений если:
У вас есть меньше чем 10 пар изображений.
Калибровочные шаблоны не покрывают достаточно фрейма изображения.
Калибровочные шаблоны не имеют достаточного изменения ориентации относительно камеры.
Рассмотрите пары удаления изображений если изображения:
Имейте высокую среднюю ошибку перепроекции.
Являются расплывчатыми.
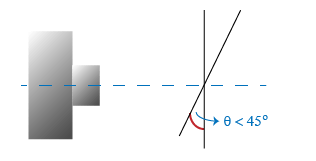
Содержите калибровочный шаблон под углом, больше, чем 45 градусов относительно плоскости камеры.
Неправильно обнаруженные калибровочные точки шаблона.
Измените количество радиальных коэффициентов искажения
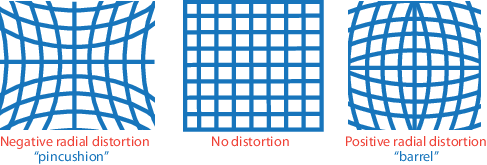
Можно задать два или три радиальных коэффициента искажения путем выбирания соответствующей опции от раздела Options. Radial distortion происходит, когда световые лучи изгибаются более близкий ребра линзы, чем они делают в ее оптическом центре. Чем меньший линза, тем больше искажение.
Радиальные коэффициенты искажения моделируют этот тип искажения. Искаженные точки обозначаются как (искаженный x, искаженный y):
x, искаженный = x (1 + k 1*r2 + k 2*r4 + k 3*r6)
y, искаженный = y (1 + k 1*r2 + k 2*r4 + k 3*r6)
x, y Неискаженные пиксельные местоположения. x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.
k 1, k 2, и k 3 — Радиальные коэффициенты искажения линзы.
r2 = x2 + y2
Как правило, два коэффициента достаточны для калибровки. Для серьезного искажения, такой как в широкоугольных объективах, можно выбрать три коэффициента, чтобы включать k 3.
Вычислите скос
Чтобы оценить скос осей изображений, на вкладке Calibration, в разделе Camera Model, выбирают Options > Compute > Skew. Некоторые датчики камеры содержат недостатки, которые заставляют x - и y - оси изображения не быть перпендикулярным. Можно смоделировать этот дефект с помощью скошенного параметра. Если вы не выбираете эту опцию, оси изображений перпендикулярны, который верен для большинства современных камер.
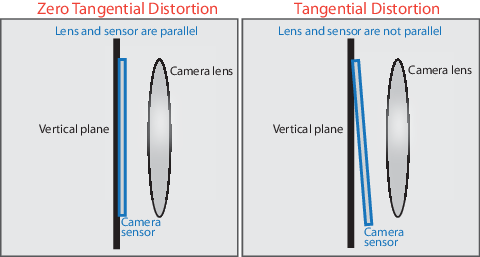
Вычислите тангенциальное искажение
Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны. Тангенциальные коэффициенты искажения моделируют этот тип искажения.
Искаженные точки обозначаются как (искаженный x, искаженный y):
x, искаженный = x + [2 * p 1 * x * y + p 2 * (r2 + 2 * x2)]
y, искаженный = y + [p 1 * (r2 + 2 *y2) + 2 * p 2 * x * y]
x, y Неискаженные пиксельные местоположения. x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.
p 1 и p 2 — Тангенциальные коэффициенты искажения линзы.
r2 = x2 + y2
Когда вы устанавливаете флажок Compute Tangential Distortion, калибратор оценивает тангенциальные коэффициенты искажения. В противном случае калибратор обнуляет тангенциальные коэффициенты искажения.
Экспортируйте параметры камеры
Когда вы будете удовлетворены своей калибровочной точностью, выберите Export Camera Parameters. Можно или сохранить и экспортировать параметры камеры в объект в рабочем пространстве MATLAB или сгенерировать параметры камеры как скрипт MATLAB.
Экспортируйте параметры камеры
Выберите > , чтобы создать stereoParameters возразите в своей рабочей области. Объект содержит внутренние и внешние параметры камеры и ее коэффициентов искажения. Можно использовать этот объект для различных задач компьютерного зрения, таких как неискажение изображений, измеряя плоские объекты и 3-D реконструкцию. Для получения дополнительной информации об измерении плоских объектов смотрите Измеряющиеся Плоские объекты с Калиброванной Камерой. Можно опционально экспортировать stereoCalibrationErrors объект, который содержит стандартные погрешности предполагаемых параметров стереофотоаппарата путем выбора Export estimation errors.
Сгенерируйте СКРИПТ MATLAB
Выберите > , чтобы сохранить ваши параметры камеры в скрипт MATLAB, позволив вам воспроизвести шаги от вашего калибровочного сеанса.