Объединенные ускорения, данные объединенные крутящие моменты и состояния
Robotics System Toolbox / Алгоритмы Манипулятора
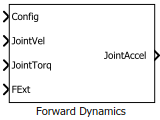
Блок Forward Dynamics вычисляет объединенные ускорения для модели робота, учитывая состояние робота, которое составлено из объединенных крутящих моментов, объединенных состояний и внешних сил. Чтобы получить объединенные ускорения, задайте настройку робота (объединенные положения), объединенные скорости, примененные крутящие моменты и внешние силы.
Задайте модель робота в параметре Rigid body tree как объект RigidBodyTree и установите свойство Gravity на объекте. Можно также импортировать модель робота из URDF (Объединенное Формирование Описания Робота) файл с помощью importrobot.

