Настройка PID-контроллера для завода LTI в интерактивном редакторе
Задача интерактивного редактора Tune PID Controller позволяет интерактивно настраивать PID-контроллер для установки. Задача автоматически генерирует код MATLAB ® для сценария в реальном времени. Дополнительные сведения о задачах Live Editor в целом см. в разделе Добавление интерактивных задач в сценарий Live.
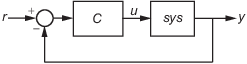
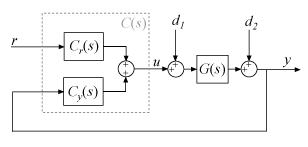
Tune PID Controller автоматически настраивает выигрыш PID-контроллера для установки SISO для достижения баланса между производительностью и надежностью. Можно указать тип контроллера, например, PI, PD или PID с фильтром производных или без него. По умолчанию контроллер PID Tune предполагает следующую стандартную конфигурацию управления с обратной связью.
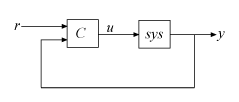
Вы также можете использовать Tune PID Controller для проектирования 2-DOF PID контроллера для конфигурации обратной связи на этой иллюстрации:
Tune PID Controller генерирует графики анализа, которые позволяют проверить производительность контроллера во временной и частотной областях. Можно в интерактивном режиме уточнить производительность контроллера, чтобы отрегулировать время отклика, полосу пропускания шлейфа или запас по фазе, или в пользу отслеживания уставок или отклонения возмущений.
Для начала работы с задачей Tune PID Controller выберите модель установки и укажите тип контроллера, который требуется спроектировать. Экспериментируйте с ползунками и наблюдайте их влияние на реакцию системы с замкнутым контуром. Пример см. в разделе Проектирование контроллера PID в интерактивном редакторе.
Чтобы добавить задачу Tune PID Controller в живой сценарий в редакторе MATLAB:
На вкладке Live Editor выберите Task > Tune PID Controller.
В блоке кода в сценарии введите соответствующее ключевое слово, например tune или PID. Выбрать Tune PID Controller из предложенных завершений команды.
Plant - Текущий заводВыберите завод для проектирования контроллера. Список содержит непрерывные или дискретные модели SISO LTI, присутствующие в рабочем пространстве MATLAB, такие как:
Состояние-пространство (ss), передаточная функция (tf) и с нулевым усилением полюсов (zpk) модели.
Для частотно-ответной информации (frd) модели. Для таких установок доступны только цели проектирования в частотной области и графики отклика.
Обобщенное состояние-пространство (genss) или неопределенное состояние-пространство (uss) модели. Для таких моделей контроллеры Tune PID используют текущее, номинальное значение перестраиваемых и неопределенных компонентов.
Идентифицированные модели, такие как idss и idtf модели.
Form - Форма контроллера'Parallel' | 'Standard'Укажите форму контроллера. Две формы различаются параметрами, используемыми для выражения пропорциональных, интегральных и производных действий, и фильтром на производном члене. Сведения о параллельных и стандартных формах см. в разделе:
Degrees of Freedom - Укажите контроллер 1-DOF или 2-DOF1DOF (по умолчанию) | 2DOFПо умолчанию контроллер Tune PID проектирует контроллер с одной степенью свободы (1-DOF). Такой контроллер имеет до четырех коэффициентов (см. Контроллеры пропорциональной интегральной производной (PID)).
Вместо этого можно сконструировать контроллер PID с двумя степенями свободы (2-DOF). Такие контроллеры включают взвешивание уставки на пропорциональном и производном слагаемых. Контроллер PID 2-DOF способен быстро устранять помехи без значительного увеличения превышения уставки. Также можно использовать контроллеры PID 2-DOF для уменьшения влияния изменений опорного сигнала на управляющий сигнал. Дополнительные сведения см. в разделе Двухстепенные контроллеры PID.
Controller Type - Укажите термины, используемые контроллером'PI' (по умолчанию) | 'PIDF' | 'PID2' | ...Тип контроллера определяет, какие термины присутствуют в контроллере PID. Например, PI-контроллер имеет пропорциональный и интегральный член. Контроллер PDF имеет пропорциональный член и отфильтрованный член производной. Дополнительные сведения о доступных типах контроллеров см. в разделе Типы контроллеров PID для настройки.
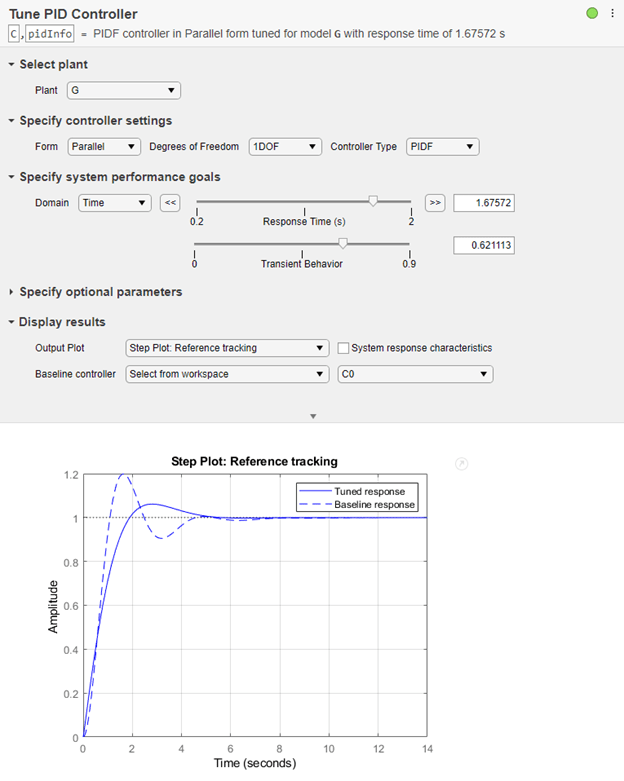
Domain - Домен для указания целевых показателей производительности'Time' (по умолчанию) | 'Frequency'Выберите домен, в котором задача отображает целевые параметры производительности.
Time - Используйте ползунки для задания целей производительности с точки зрения времени отклика и переходного поведения. Настройка во временной области недоступна для установок обработки данных с частотным откликом, таких как frd растения.
Frequency - Используйте ползунки для задания целей производительности с точки зрения полосы пропускания цикла и запаса по фазе.
Выбор домена не влияет ни на конструкцию базового контроллера, ни на результаты. Вы можете использовать то, что более удобно для вас или более подходит для вашего приложения. Например, если цели проектирования включают в себя целевое время подъема, может оказаться удобным работать во временной области. При наличии целевой полосы пропускания петли может потребоваться работа в частотной области. В обеих областях существует компромисс между эталонным отслеживанием и эффективностью отклонения возмущений.
Response Time, Transient Behavior - Цели производительности во временной областиПри установке для параметра Домен значения Timeиспользуйте эти ползунки для регулировки быстродействия и надежности контроллера.
Используйте ползунок Время отклика (Response Time), чтобы сделать отклик системы управления по замкнутому контуру быстрее или медленнее. Чтобы изменить пределы ползунка, перетащите его влево или вправо. Чтобы уменьшить или увеличить время отклика в 10 раз, щелкните![]() значок или.
значок или.![]()
Используйте ползунок Transient Behavior, чтобы сделать контроллер более агрессивным при отклонении возмущений (меньшие значения) или более устойчивым к неопределенности установки (большие значения).
Настройка во временной области недоступна для установок обработки данных с частотным откликом, таких как frd растения.
Bandwidth, Phase Margin - Цели производительности частотной областиПри установке для параметра Домен значения Frequencyс помощью этих ползунков отрегулируйте полосу пропускания и запас по фазе системы управления.
Используйте ползунок Bandwidth, чтобы сделать отклик системы управления по замкнутому контуру быстрее или медленнее (время отклика 2/wc, где wc - полоса пропускания). Чтобы изменить пределы ползунка, перетащите его влево или вправо. Чтобы уменьшить или увеличить пропускную способность в 10 раз, щелкните![]() значок или.
значок или.![]()
Для контроллеров дискретного времени контроллер Tune PID ограничивает максимальную полосу пропускания до pi/Ts, где Ts - время выборки выбранного завода.
Используйте ползунок Phase Margin, чтобы сделать контроллер более агрессивным при отклонении возмущений (меньшие значения) или более устойчивым к неопределенности завода (большие значения).
Design focus - Цель производительности с замкнутым циклом в пользуBalanced (по умолчанию) | Reference tracking | Input disturbance rejectionДля заданного целевого запаса фазы контроллер Tune PID выбирает конструкцию контроллера, которая уравновешивает два показателя производительности, эталонное отслеживание и отклонение возмущений. При изменении параметра «Фокус проектирования» алгоритм настройки пытается скорректировать прирост PID в пользу отслеживания ссылок или отклонения возмущений при достижении того же целевого запаса фазы.
Параметры фокуса конструирования:
Balanced - Для данной надежности настройте контроллер, чтобы сбалансировать эталонное отслеживание и отклонение возмущений.
Reference tracking - По возможности настройте контроллер в пользу отслеживания ссылок.
Input disturbance rejection - При возможности настройте контроллер в пользу отказа от нарушения.
Чем больше в системе настраиваемых параметров, тем больше вероятность того, что алгоритм PID сможет достичь желаемого проектного фокуса без ущерба для надежности. Например, установка проектного фокуса с большей вероятностью будет эффективной для ПИД-контроллеров, чем для P-контроллеров или ПИ-контроллеров.
Во всех случаях, насколько можно точно настроить производительность системы, сильно зависит от свойств вашего завода. Для некоторых заводов изменение параметра «Фокус проектирования» может привести к незначительному эффекту или отсутствию эффекта.
Integral formula, Filter formula - Формула для дискретных интегральных и производных членовForward Euler (по умолчанию) | Backward Euler | TrapezoidalДля ПИД-контроллеров дискретного времени существуют различные способы реализации терминов интегратора и фильтра. Например, для ПИД-контроллера с дискретным временем параллельной формы передаточной функцией контроллера является
+ DF (z).
IF (z) и DF (z) являются дискретными формулами интегратора для интегратора и производного фильтра. (Сведения о влиянии IF (z) и DF (z) на другие формы контроллеров, включая стандартные контроллеры форм и 2-DOF, см. в разделе Контроллеры дискретной пропорциональной и интегральной производных (PID).)
Используйте формулу Интеграл (Integral) и формулу Фильтр (Filter), чтобы выбрать значения IF (z) и DF (z) соответственно .
Forward Euler - IF (z) или DF (z) − 1.
Эта формула лучше всего подходит для малого времени выборки, где предел Найквиста велик по сравнению с полосой пропускания контроллера. Для большего времени выборки, Forward Euler формула может привести к нестабильности, даже когда вы дискретизируете систему, которая стабильна в непрерывном времени.
Backward Euler - IF (z) или DF (z) − 1.
Преимущество Backward Euler формула состоит в том, что дискретизация стабильной системы непрерывного времени с использованием этой формулы всегда дает стабильный результат дискретного времени.
Trapezoidal - IF (z) или DF (z) 1z − 1.
Преимущество Trapezoidal формула состоит в том, что дискретизация стабильной системы непрерывного времени с использованием этого способа всегда дает стабильный результат дискретного времени. Из всех доступных дискретных интеграторных формул, Trapezoidal дает наиболее близкое совпадение между свойствами частотной области дискретизированной системы и соответствующей системой непрерывного времени.
Output Plot - График ответа системы для генерацииStep Plot: Reference tracking (по умолчанию) | Step Plot: Input disturbance rejection | Bode Plot: Open-loop | ...Укажите график ответа для наблюдения за влиянием PID-контроллера на производительность системы. Можно задать график ступенчатого отклика временной области или график Бода частотной области для различных системных ответов. Код, генерируемый контроллером PID в живом сценарии, включает код для создания выбранного графика.
Для 1-DOF типов PID-контроллеров, таких как PI, PIDF и PDF, программное обеспечение вычисляет системные ответы на основе следующей одноконтурной архитектуры управления, где G - указанное оборудование, а C - PID-контроллер:
Для 2-DOF типов контроллеров PID, таких как PI2, PIDF2 и I-PD, программное обеспечение вычисляет ответы на основе следующей архитектуры:
Системные ответы основаны на разложении диспетчера PID с 2 финансовыми департаментами, К, в компонент заданного значения Cr и компонент обратной связи Сай, как описано в Двух Диспетчерах PID Степени свободы.
В следующей таблице суммированы доступные ответы для графиков анализа. (Для установок обработки данных с частотным откликом, таких как frd модели, графики ответов во временной области недоступны.)
| Ответ | Печатаемая система (1-DOF) | Печатаемая система (2-DOF) | Описание |
|---|---|---|---|
Plant | G | G | Реакция завода. Используйте для изучения динамики завода. |
Open-loop | GC | -GCy | Отклик системы контроллер-установка с разомкнутым контуром. Используется для проектирования частотной области. Используется в тех случаях, когда в спецификации проекта включены критерии надежности, такие как запас усиления в разомкнутом контуре и запас фазы. |
Reference tracking | GC (от r до y) | GCy (от r до y) | Реакция системы с замкнутым контуром на шаговое изменение уставки. Используйте, если проектные спецификации включают отслеживание уставок. |
Controller effort | GC (от r до u) | GCy (от r до u) | Выходной отклик контроллера с замкнутым контуром на шаговое изменение уставки. Используйте, когда конструкция ограничена практическими ограничениями, такими как насыщенность контроллера. |
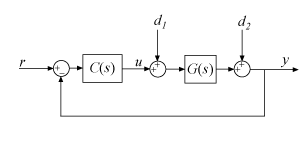
Input disturbance rejection | GC (от d1 до y) | GCy (от d1 до y) | Реакция системы с замкнутым контуром на нарушение нагрузки (ступенчатое нарушение на входе в установку). Используется в тех случаях, когда проектные спецификации включают отклонение входных возмущений. |
Output disturbance rejection | GC (от d2 до y) | GCy (от d2 до y) | Реакция системы с замкнутым контуром на ступенчатое нарушение на выходе из установки. Используется для анализа чувствительности к ошибкам моделирования. |
System response characteristics - Отображение числовых характеристик обратной реакцииoff (по умолчанию) | onЭта опция используется для создания отображения числовых характеристик отклика с замкнутым или разомкнутым контуром.
Когда график вывода является пошаговым графиком, отображение включает такие характеристики, как время подъема, время установки и процент превышения. Эти значения всегда соответствуют отклику на шаг с замкнутым контуром от входа r системы управления к выходу y, независимо от того, какой отклик на шаг выбран для графика. Tune PID Controller использует stepinfo вычисляют характеристики ступенчатого ответа. Для получения подробной информации о том, как интерпретировать эти значения, см. stepinfo справочная страница.
Когда график вывода является графиком Бода, дисплей включает такие характеристики, как запас усиления и запас фазы. Эти значения всегда являются значениями ответа GC системы с разомкнутым контуром независимо от выбранного графика Боде. Tune PID Controller использует allmargin вычисляют частотно-характеристические характеристики. Для получения подробной информации о том, как интерпретировать эти значения, см. allmargin справочная страница.
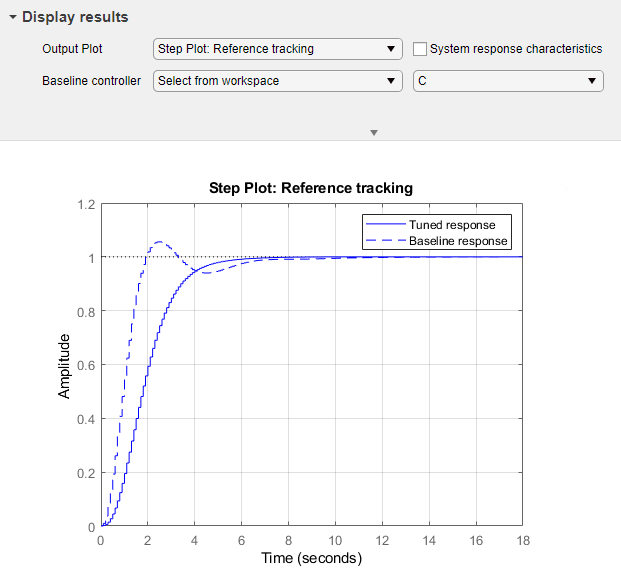
Baseline controller - Контроллер для сравнения производительностиNone (по умолчанию) | Select from workspaceЭта опция используется для сравнения производительности настроенного контроллера с другим ПИД-контроллером в рабочем пространстве MATLAB. Для этого выберите Select from workspace. Появится другое меню, содержащее объекты модели PID, которые в настоящее время находятся в рабочем пространстве. Список включает объекты модели ПИД всех типов (pid, pidstd, pid2, или pidstd2), которые относятся к той же области времени, что и указанное в данный момент устройство. Например, если установка является дискретно-временной моделью состояния-пространства, то любой дискретно-временной объект модели PID в рабочем пространстве доступен в качестве контроллера базовой линии.
При указании контроллера опорной структуры график ответа обновляется, чтобы включить график ответа системы с пунктирными линиями в контроллер базовой линии.
Можно сохранить проект, который будет использоваться в качестве опорной структуры, во время дальнейших экспериментов с типами контроллеров, целями производительности и другими параметрами. Для этого при нахождении конструкции, которую требуется использовать в качестве опорной структуры, выполните следующие действия.
Обратите внимание на имя переменной рабочей области контроллера в строке сводки задачи (см. Советы). Например, если имя C, то текущий контроллер находится в рабочей области MATLAB как C.
Измените имя переменной контроллера в строке сводки задачи. Например, измените его на Cnew.
Выберите базовый контроллер и укажите сохраненный контроллер C в качестве базовой линии.
При дальнейшем эксперименте с конструкцией контроллера задача сохраняет изменения контроллера в рабочей области как Cnew. График показывает отклик базовой линии с помощью C и настроенный ответ с использованием Cnew.
После выбора завода задача создает контроллер и сохраняет его в рабочем пространстве MATLAB. Сохраненный контроллер является pid, pidstd, pid2, или pidstd2 объект модели, как указано при выборе параметров Форма (Form) и Степени свободы (Degrees of Freedom).
Имя переменной по умолчанию для сохраненного контроллера: C. Можно изменить имя переменной, введя новое имя в строку сводки задачи.

Задача также предоставляет информацию о производительности и надежности системы с замкнутым контуром в структуре, называемой pidInfo по умолчанию. Для получения информации об этой структуре см. info выходной аргумент на pidtune справочная страница.
Контроллер Tune PID использует алгоритм, описанный в алгоритме настройки PID.
