Преобразование актера из кубических координат в 3D координаты моделирования
Автоматизированная панель инструментов вождения/сценарий вождения и моделирование датчиков
Блок «Cuboid To 3D Simulation» преобразует позу кубоидного актера в мировых координатах в координаты X, Y и Yaw, используемые блоком «Simulation 3D Vehicle with Ground Following». Используйте преобразованные значения для установки положений транспортного средства в среде моделирования 3D для субъектов, созданных с помощью приложения «Конструктор сценариев вождения». Наземная местность сцены определяет крен (вращение по оси X), шаг (вращение по оси Y) и отметку (положение по оси Z) транспортного средства.
Можно указать шину, содержащую одну позу актера или несколько поз актера. По умолчанию блок преобразует позу первого актера на шине. Чтобы указать актера, позу которого требуется преобразовать, укажите ActorID этого актера.
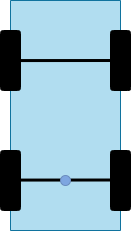
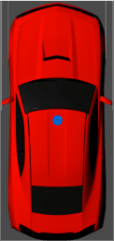
В сценариях управления кубоидным и 3D моделированием системы координат одинаковы, но происхождение транспортных средств различается. В кубоидных сценариях движения начало движения транспортного средства находится на земле под центром задней оси. Блок преобразует начало координат в начало координат, используемое в среде моделирования 3D, которая находится под геометрическим центром транспортного средства. В таблице показана разница в происхождении между двумя средами.
| Cuboid Vehicle Origin ( | 3D Происхождение имитационного транспортного средства |
|---|---|
|
|
Считыватель сценариев | Имитация 3D транспортного средства со следующим грунтом | Транспортное средство в мир | От мира до автомобиля