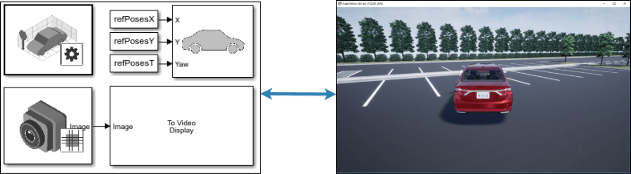
Automated Driving Toolbox™ предоставляет структуру совместного моделирования для моделирования и визуализации алгоритмов управления в Simulink ® в насыщенной среде моделирования. В этой среде моделирования используется Unreal Engine by Epic Games.
В этой среде моделирования можно настроить предварительно построенные сцены, разместить и переместить транспортные средства в пределах сцены, а также настроить и смоделировать камеры, радары или лидарные датчики на транспортных средствах. Эта среда используется для разработки, тестирования и проверки производительности алгоритмов восприятия, планирования тракта и управления, включая алгоритмы с замкнутым контуром. Дополнительные сведения см. в разделе Моделирование нереального двигателя для автоматического вождения.
| Область действия птичьего глаза | Визуализация покрытий датчиков, обнаружений и следов |
Нереальное моделирование двигателя для автоматизированного вождения
Узнайте, как моделировать алгоритмы вождения в Simulink и визуализировать их производительность в виртуальной среде с помощью Unreal Engine от Epic Games.
Требования и ограничения среды моделирования нереального двигателя
При моделировании в среде Unreal Engine следует учитывать эти требования к программному обеспечению, минимальные рекомендации по аппаратному обеспечению и ограничения.
Как работает нереальное моделирование двигателя для автоматизированного вождения
Узнайте о структуре совместного моделирования между Simulink и Unreal Engine и о том, как порядок выполнения блоков влияет на моделирование.
Понимание мира и систем координат транспортного средства при моделировании в среде Unreal Engine.
Выберите датчик для моделирования нереального двигателя
Определите, какие датчики камеры, лидара или радара следует использовать при моделировании с помощью Unreal Engine.
Моделирование простого сценария вождения и датчика в среде нереального двигателя
Изучите основы настройки и моделирования сцен, транспортных средств и датчиков в виртуальной среде, визуализированной с помощью Unreal Engine из Epic Games.
Визуализация данных глубины и семантической сегментации, полученных с датчика камеры в среде моделирования Unreal Engine.
Визуализация данных датчиков из среды моделирования нереального двигателя
Визуализация зон действия датчиков и обнаружений, полученных от высокоточных радаров и лидарных датчиков в среде моделирования Unreal Engine.
Настройка нереальных сцен движка для автоматического вождения
Настройка сцен Unreal Engine для автоматических приложений вождения.
Применение семантических меток сегментации к пользовательским сценам
Примените метки к объектам в сцене, чтобы получить семантические данные сегментации от датчика камеры.
Создать карту сверху вниз сцены нереального механизма
Создайте 2-D, нисходящую карту 3-D сцены, разработанной с помощью Unreal Engine из Epic Games. Эти карты используются для просмотра сцены и указания ППМ траектории.
Размещение камер на актерах в нереальном редакторе
Поместите блок Simulation 3D Camera GetSimulation 3D Camera на статических и пользовательских актерах.
Подготовка пользовательской сетки транспортного средства для нереального редактора
Создайте пользовательскую сетку транспортного средства для блока «Моделирование» 3D «Транспортное средство» и «Моделирование» 3D «Транспортное средство» с блоками «Грунт».





