Создать карту занятости 3-D
occupancyMap3D класс сохраняет карту 3-D и информацию о карте. Карта сохраняется как вероятностные значения в структуре данных octree. Класс обрабатывает произвольные среды и динамически расширяет их размер на основе входных данных наблюдений. Можно добавлять наблюдения как облака точек или как конкретные расположения xyz. Эти наблюдения обновляют значения вероятности. Вероятностные значения представляют заполняемость местоположений. Структура данных octree соответствующим образом обрезает данные, чтобы они оставались эффективными как в памяти, так и на диске.
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution собственность.
omap = occupancyMap3D(res,Name,Value)Name,Value аргументы пары. Например, 'FreeThreshold',0.25 устанавливает порог, чтобы считать ячейки свободными от препятствий, как значение вероятности 0,25. Заключите каждое имя свойства в кавычки.
checkOccupancy | Проверьте, свободны или заняты ли местоположения |
getOccupancy | Получение вероятности занятости местоположений |
inflate | Накачать карту |
insertPointCloud | Вставка точек 3-D или наблюдений облака точек на карту |
rayIntersection | Поиск точек пересечения лучей и занятых ячеек карты |
setOccupancy | Установка вероятности занятости местоположений |
show | Показать карту заполняемости |
updateOccupancy | Обновить вероятность занятости в местах |
occupancyMap3D объект сохраняет препятствия в 3-D пространстве, используя наблюдения датчиков для отображения среды. Создайте карту и добавьте точки из облака точек для определения препятствий. Затем надувайте препятствия на карте, чтобы обеспечить безопасное рабочее пространство вокруг препятствий.
Создание occupancyMap3D объект с разрешением карты 10 ячеек/метр.
map3D = occupancyMap3D(10);
Определение набора точек 3-D как наблюдения из позы [x y z qw qx qy qz]. Эта поза предназначена для датчика, который наблюдает за этими точками и центрируется по началу координат. Определите два набора точек для вставки нескольких наблюдений.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Вставка первого набора точек с помощью insertPointCloud. Функция использует позу датчика и заданные точки для вставки наблюдений на карту. Отображаемые цвета соотносятся с высотой точки только в иллюстративных целях.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)

Вставьте второй набор точек. Луч между позой (началом координат) датчика и этими точками перекрывает точки предыдущей вставки. Поэтому свободное пространство между датчиком и новыми точками обновляется и помечается как свободное пространство.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)

Надуть карту, чтобы добавить буферную зону для безопасной работы вокруг препятствий. Определите радиус транспортного средства и расстояние безопасности и используйте сумму этих значений для определения радиуса накачки для карты.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)

Структура данных octree - иерархическая структура, используемая для разделения среды на кубические объёмы, называемые вокселами. Для данного объема карты пространство рекурсивно подразделяется на восемь вокселей до тех пор, пока не будет достигнуто желаемое разрешение карты (размер вокселя). Это подразделение может быть представлено в виде дерева, в котором хранятся значения вероятностей для местоположений на карте.
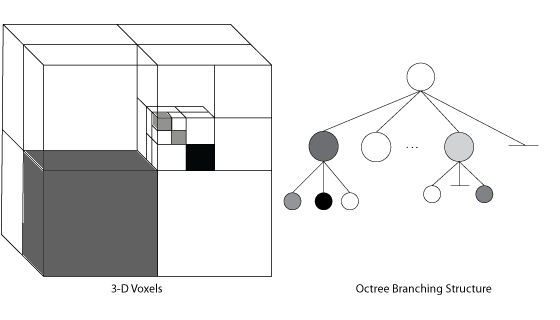
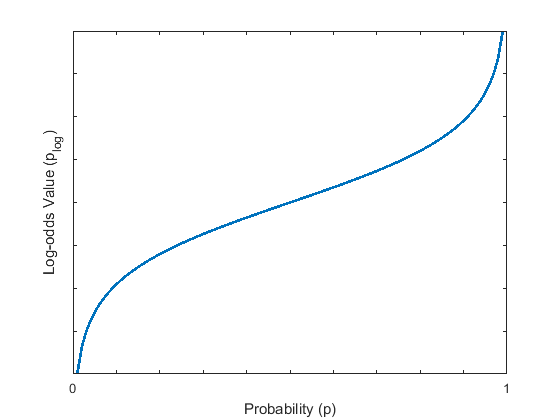
Значения вероятности в дереве имеют логарифмическое представление. Используя это представление, расположения легко восстанавливаются после динамических наблюдений и численные ошибки из-за малых вероятностей уменьшаются. Чтобы оставаться эффективными в памяти, нижние ветви дерева отсекаются в структуре, если они имеют одинаковые значения занятости, используя это представление логарифмических шансов.
Класс внутренне обрабатывает организацию этой структуры данных, включая обрезку ветвей. Укажите все наблюдения как пространственные координаты при использовании функций, таких как setOccupancy, getOccupancy, или insertPointCloud. Вставки в дерево и навигация по дереву определяются на основе пространственных координат и разрешения карты.
[1] Хорнунг, Армин, Кай М. Вурм, Марен Бенневиц, Сирилл Стахнисс и Вольфрам Бургард. «OctoMap: эффективная вероятностная структура отображения 3D, основанная на octrees». Автономные роботы, т. 34, № 3, 2013, стр. 189-206.. doi: 10.1007/s10514-012-9321-0.
inflate | insertPointCloud | setOccupancy | show | readOccupancyMap3D (панель инструментов ROS)