Колесо, завернутое в шнур для передачи крутящего момента и движения
Simscape/Multibody/Ремни и кабели

Блок шкива представляет собой зубчатое колесо с канавками, обернутое в шнур, устройство, которое часто используется для передачи крутящего момента и движения частично для того механического преимущества, которое оно может обеспечить. Шкив (или звездочка, если зубчатая) идеален: безмассовый и бесфрикционный, с нулевым проскальзыванием, допускаемым между его поверхностью и окружающим шнуром, сам идеализирован как натянутый и нерастяжимый. Использовать шкив отдельно или как часть составной системы шкивов, такой как блок и снаряд подъемника или синхронизирующий ремень двигателя автомобиля.
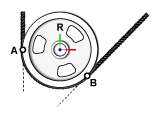
Шкив имеет одну локальную опорную рамку (порт R рамы) и две точки касания шнура (порты A и B ремня и кабеля). Опорная рамка расположена с началом координат в центре шкива и его осью Z вдоль оси вращения шкива. Точки касания шнура совпадают с местами, в которых шнур встречается или отделяется от шкива. Эти расположения могут изменяться во время моделирования. Ремень или кабель оборачивается вокруг шкива от порта А к порту В так, чтобы проследить дугу против часовой стрелки вокруг оси Z.
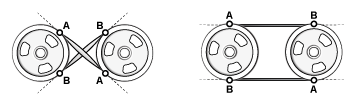
В замкнутой системе из двух шкивов, таких как ременной привод, соединения портов ремень-кабель определяют, пересекается или разомкнута геометрия шнура. Как показано на следующей схеме, в системе шкивов, в которой оси Z совмещены параллельно, если порт А одного соединяется с портом А другого, то шнур пересекается; если порт A одного порта подключается к порту B другого порта, то шнур разомкнут. Эффект тот же, если вместо переключения соединений портов одна из рам переворачивается так, что оси z шкивов противопараллельны.
Степени свободы шкива полностью зависят от соединений и ограничений (если таковые имеются), с которыми он соединяется. Прикрепление шкива к корпусу посредством поворотного соединения придает шкиву одну степень свободы вращения относительно корпуса; один из них может свободно вращаться относительно другого. Крепление шкива к другому шкиву посредством прямого соединения, жесткого преобразования или сварного соединения ограничивает два шкива таким образом, что если один вращается, то и другой должен быть таким же.
По умолчанию шнур может входить в шкив и выходить из него под углом к его центральной плоскости ( Этот угол может изменяться при моделировании - например, за счет поступательного перемещения шкива на призматическом соединении. Хотя точка контакта всегда находится в центральной плоскости шкива, шкив может перемещаться при установке на шарнире. Шнур также может быть ограничен для входа и выхода из шкива в его центральной плоскости. Применение этого ограничения зависит от настроек блока «Свойства ремня-кабеля».
Шкивы должны оставаться на расстояниях, которые сохраняют естественную длину шнура. Эта длина рассчитывается по первоначальным размещениям шкивов и фиксируется: шнур не может ни растягиваться, ни ослабевать при моделировании. Расчеты длины включают длины дуги шнура вокруг шкивов. Контакт между ними идеализируется как скользящий, при этом точка контакта на шнуре всегда движется с той же мгновенной скоростью, что и его аналог на шкиве.
Обратите внимание, что порты полки и ременного кабеля принадлежат различным многозвенным доменам. Как правило, порты подключаются только к аналогичным портам - порты полки к другим портам полки, порты ремень-кабель к другим портам ремень-кабель. Область «ремень-кабель» требует, чтобы каждая сеть или линии подключения «ремень-кабель» соединялись с одним (и не более одного) блоком «Свойства ремня-кабеля». Именно через этот блок конфигурируется визуализация шнура и вычисляется его длина (при обновлении диаграммы).
Визуализация шнура выполнена в виде линии шага. Шнур встречается и отделяется от шкива по касательной к его окружности. Дуга контакта между шнуром и шкивом называется дугой наклона. Линия шага шнура представляет собой сумму отрезков линии между различными шкивами и их соответствующими дугами шага. Отрезки между шкивами показаны прямолинейными, что согласуется с ограничением, заключающимся в том, что ослабление не допускается.
Объедините блок шкива с блоком катушек ремня-кабеля для извлечения из лебедки и возврата к ней дополнительных отрезков шнура. Примером применения является опускание и подъем крюкового блока башенного крана. Используйте блок «Конец ремня-кабеля» для определения конечной точки шнура. Конечная точка содержит раму для соединения с нагрузкой, приспособлением или другой частью модели с несколькими телами.
Pitch Radius - Расстояние от центра шкива до центральной линии шнура10 cm (по умолчанию) | положительный скаляр в единицах длиныРасстояние от центра шкива до осевой линии шнура в любой точке контакта. В сложных системах шкивов различия в радиусах тангажа часто определяют отношение, при котором скорость снижается или увеличивается крутящий момент.
Initial Wrap Angle - Минимальный угол обтекания шкива в начале моделирования0.0 deg (по умолчанию) | положительный скаляр в градусахНижняя граница (Lower Bound) - укажите нижнюю границу начального угла обтекания шкива. Угол обтекания в начале моделирования больше или равен указанному значению.
Sensing - Выбор кинематических переменных для считыванияUnchecked (по умолчанию) | ПровереноВыбор кинематических переменных для считывания. Установите флажок, чтобы открыть физический сигнальный порт для соответствующей переменной. Для зондирования доступны следующие переменные:
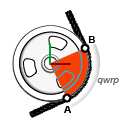
Угол обтекания - угол от точки контакта, связанной с портом A, до точки контакта, связанной с портом B. Этот угол измеряется в центральной (xy) плоскости шкива. Оно всегда равно или больше нуля, его значение увеличивается на 2π для каждого оборота, выполненного против часовой стрелки относительно локальной оси z. Используйте порт qwrp для этого измерения.
На рисунке показан угол обертывания между точками контакта (А и В шкива). Локальная опорная рамка указывает ось X (горизонтальная) и ось Y (вертикальная) шкива.
Угол шкива A - угол, измеренный в плоскости xy опорной рамы, от локальной оси x до линии между началом координат рамы и точкой контакта A.
Если точка контакта находится над xz-плоскостью (в + y-области опорной рамки), угол является положительным. Если точка контакта находится ниже плоскости xz, угол будет отрицательным. Когда точка контакта находится точно в плоскости xz, угол равен нулю.
Угол не является модульным. Вместо ограничения на 360-градусный диапазон - привязка к началу диапазона после завершения поворота - измеренное значение изменяется непрерывно с повторными поворотами. Каждый поворот, который делает барабан, добавляет (или вычитает) 2δ к измерению.
Для этого измерения используйте порт qpa.
Углы шкива A и B
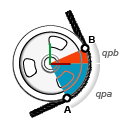
Угол шкива B - угол, измеренный в плоскости xy опорной рамы, от локальной оси x до линии между началом координат рамы и точкой контакта B.
Если точка контакта находится над xz-плоскостью (в + y-области опорной рамки), угол является положительным. Если точка контакта находится ниже плоскости xz, угол будет отрицательным. Когда точка контакта находится точно в плоскости xz, угол равен нулю.
Угол не является модульным. Вместо ограничения на 360-градусный диапазон - привязка к началу диапазона после завершения поворота - измеренное значение изменяется непрерывно с повторными поворотами. Каждый поворот, который делает барабан, добавляет (или вычитает) 2δ к измерению.
Для этого измерения используйте порт qpb.
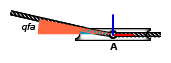
Угол автопарка A - угол от плоскости xy опорной рамы до шнура в точке контакта A. Плоскость xy совпадает с центральной плоскостью барабана.
Если шнур приближается к точке контакта сверху плоскости xy (в области + z опорной рамки), угол положительный. Если шнур приближается снизу, угол отрицательный. Угол равен нулю, когда шнур приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, что означает, что его значение ограничено - здесь, между -λ/2 до + δ/2. Этот диапазон открыт. Измеренное значение может изменяться в диапазоне от -λ/2 до + δ/2, но не может достичь ни одного из пределов.
Обратите внимание, что если для параметра «Выравнивание барабанного ремня - кабеля» блока «Свойства ремня - кабеля» задано значение Monitored Planar, узел шкива должен быть плоским, и поэтому угол поворота всегда равен нулю. Для моделирования неплоской сборки используйте настройку по умолчанию для этого параметра: Unrestricted.
Для этого измерения используйте порт qfa.
Угол флота A
Угол парка B - угол от плоскости xy опорной рамы до шнура в точке контакта B. Плоскость xy такая же, как и центральная плоскость барабана.
Если шнур приближается к точке контакта сверху плоскости xy (в области + z опорной рамки), угол положительный. Если шнур приближается снизу, угол отрицательный. Угол равен нулю, когда шнур приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, что означает, что его значение ограничено - здесь, между -λ/2 до + δ/2. Этот диапазон открыт. Измеренное значение может изменяться в диапазоне от -λ/2 до + δ/2, но не может достичь ни одного из пределов.
Обратите внимание, что если для параметра «Выравнивание барабанного ремня - кабеля» блока «Свойства ремня - кабеля» задано значение Monitored Planar, узел шкива должен быть плоским, и поэтому угол поворота всегда равен нулю. Для моделирования неплоской сборки используйте настройку по умолчанию для этого параметра: Unrestricted.
Для этого измерения используйте порт qfb.
Конец ремня-кабеля | Свойства ремня-кабеля | Катушка ремня-кабеля







