Источник и поглотитель шнура в системе шкива
Simscape/Multibody/Ремни и кабели

Блок катушек ремня-кабеля представляет собой цилиндрический барабан, на который наматывается (и из которого разматывается) шнур шкивной системы. Катушка отмечает конец шнура и точку, в которой двигатель или другой источник питания часто тянет за собой нагрузку. Блок конца ремня-кабеля обычно обозначает второй конец шнура, к которому обычно прикрепляется сама нагрузка. В зависимости от того, является ли она намоткой или разматыванием, катушка может вести себя как бесконечный источник шнура или как бесконечный поглотитель того же самого.
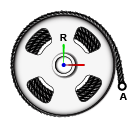
Катушка служит в качестве интерфейса между областью ремень-кабель, характерной для систем шкивов, и областью рамы, общей для всех других компонентов корпуса. Порт (А) ременного кабеля идентифицирует кончик шнура, который должен наматываться на катушку, и относительное расположение этого кончика в системе шкива. Порт кадра (R) идентифицирует опорную рамку катушки и ее размещение в более широкой многофюзеляжной модели.
Степени свободы катушки являются функцией соединения, с помощью которого катушка соединяется с другими компонентами. Обычно соединение вращения обеспечивает эти степени свободы; в этом случае они уменьшаются до поворота вокруг одной оси (оси катушки). Приводные входы, определяемые непосредственно через соединение посредством сигналов крутящего момента или движения, служат для привода золотника и для намотки (или разматывания) шнура.
Шнур входит и выходит из барабана по касательной с окружностью барабана. В соответствии с правилом правой руки обмотка находится в направлении против часовой стрелки вокруг оси вращения барабана. Эта ось по определению является осью Z локальной системы координат (R). Чтобы обратить направление обмотки, необходимо развернуть локальную опорную рамку так, чтобы ось Z указывала в противоположном направлении - например, путем применения поворота рамки через блок жесткого преобразования.
Поверхность катушки (гладкая или рифленая) в модели не учитывается. Кроме того, предполагается, что шнур обвит вокруг катушки по окружности, которая имеет постоянный радиус (радиус начальной окружности) и копланарную с поперечным сечением лебедки. Изменения радиуса катушки из-за намотки игнорируются.
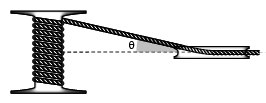
По умолчанию шнур может входить в катушку и выходить из нее под углом к ее центральной плоскости ( Этот угол может изменяться во время моделирования - например, из-за поступательного перемещения катушки на призматическом соединении. Хотя точка контакта всегда находится в центральной плоскости катушки, катушка может перемещаться при установке на соединение. Шнур также может быть ограничен для входа и выхода из катушки в ее центральной плоскости. Применение этого ограничения зависит от настроек блока «Свойства ремня-кабеля».
Инерция катушки и намотанного на нее шнура также игнорируются. Чтобы зафиксировать инерцию катушки фиксированной массы, используйте блок Цилиндрическое тело (Cylindrical Solid) или Инерция (Inertia). Рассмотрим блок Цилиндрическое тело (Cylindrical Solid), если твердотельная геометрия важна в модели. Чтобы зафиксировать свойства переменной массы шнура при его наматывании и разматывании из катушки, используйте блок из библиотеки переменных тел, например Переменное цилиндрическое тело (Variable Cylindrical Solid) или Общая переменная масса (General Variable Mass).








