Криволинейная дорожная среда 3D
Сцена «Изогнутая дорога» представляет собой 3D среду кривой петли шоссе. Сцена визуализируется с помощью Unreal Engine ® из Epic Games ®.

Чтобы смоделировать маневр вождения в этой сцене:
Добавьте блок «Моделирование» 3D «Конфигурация сцены» в модель Simulink ®.
В этом блоке задайте для параметра «Источник сцены» значение Default Scenes.
Установите для параметра enabled Scene name значение Curved road.
Для определения местоположения объектов сцена использует мировую систему координат.
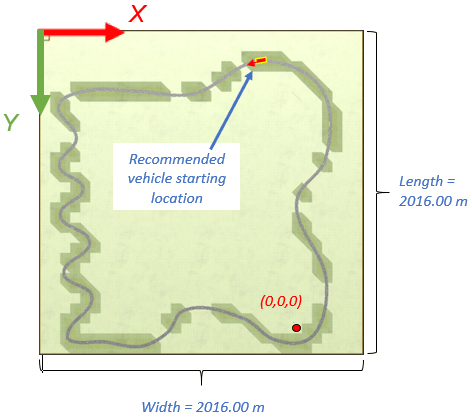
В этой таблице представлены угловые расположения сцен в мировой системе координат. Размеры в м.
Местоположение | X (м) | Y (м) | Z (м) |
|---|---|---|---|
Сцена - слева снизу |
|
|
|
Сцена - вверху справа |
|
|
|
В этой таблице представлено рекомендуемое начальное местоположение транспортного средства в мировой системе координат. Размеры в м и град.
Рекомендуемое начальное расположение | |||||
|---|---|---|---|---|---|
X (м) | Y (м) | Z (м) | Список (град.) | Подача (град.) | Отклонение от курса (град.) |
0.2 |
|
|
|
|
|
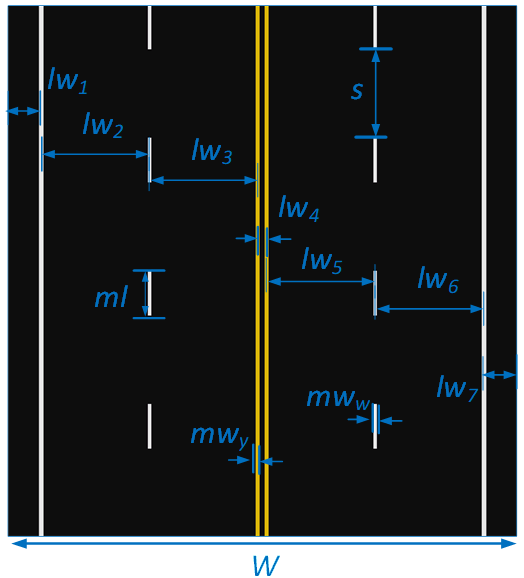
В этом рисунке и таблице приведены размеры полосы движения, в м.
Переменная | Размерность (м) |
|---|---|
lw1 | 1.2 |
lw2 | 3.82 |
lw3 | 3.82 |
lw4 | 0.3 |
lw5 | 3.83 |
lw6 | 3.83 |
lw7 | 1.2 |
ml | 1.5 |
s | 3.0 |
mww | 0.13 |
mwy | 0.15 |
W | 18.0 |
В среде визуализации 3D используется мировая система координат с осями, фиксированными в инерциальной системе координат.
![]()
| Ось | Описание |
|---|---|
| X | Направление движения транспортного средства вперед Крен - поворот правой стороны вокруг оси X |
| Y | Простирается справа от транспортного средства параллельно плоскости грунта Шаг - поворот вправо вокруг оси Y |
| Z | Выдвигается вверх Yaw - поворот левой стороны вокруг оси Z |
Если имеется пакет поддержки Vehicle Dynamics Blockset™ Interface for Unreal Engine 4 Projects, можно изменить эту сцену. В файле проекта Unreal Engine, поставляемом с пакетом поддержки, эта сцена называется HwCurve.
Дополнительные сведения о настройке сцен см. в разделе Настройка сцен 3D для моделирования динамики транспортных средств.
