Гибридное электрическое транспортное средство примера готовых узлов представляет модель полного многомодового гибридного электрического транспортного средства (HEV) с двигателем внутреннего сгорания, коробкой передач, батареей, двигателем, генератором и соответствующими алгоритмами управления силовым агрегатом. Используйте пример готовых узлов для анализа соответствия силового агрегата и выбора компонентов, проекта алгоритмов управления и диагностики и аппаратных средств в цикле (HIL) проверки. Чтобы создать и открыть рабочую копию гибридного электрического транспортного средства примера готовых узлов проекта, введите
По умолчанию мультимодовый пример готовых узлов HEV сконфигурирован с:Отображенные двигатель и генератор
1.5-L двигатель с искровым зажиганием (СИ)
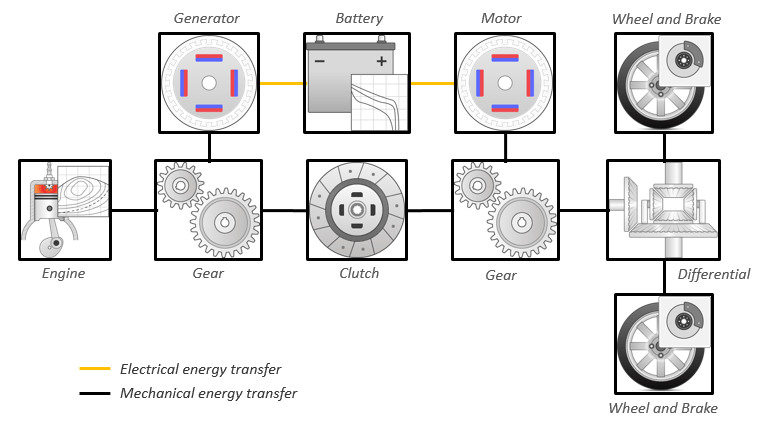
Эта схема показывает строение силового агрегата.
Эта таблица описывает блоки и подсистемы в пример готовых узлов, указывая, какие подсистемы содержат варианты. Для реализации вариантов модели примера готовых узлов использует подсистемы вариантов.
| Пример готовых узлов | Описание | Варианты |
|---|---|---|
Анализируйте степень и энергию |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и энергии на уровне компонентов и уровня системы. Для получения дополнительной информации о live скрипте, смотрите Анализ степени и энергии. | НА |
Drive Cycle Source блок - FTP75 (2474 секунды) | Генерирует стандартный или пользовательский профиль зависимости скорости цикла привода от времени. Выходы блока - это выбранная или заданная продольная скорость транспортного средства. | ✓ |
| Создает переменные окружения, включая ранг дороги, скорость ветра, а также атмосферную температуру и давление. | |
|
Использует Longitudinal Driver варианта или разомкнутой петли, чтобы сгенерировать нормированные команды ускорения и торможения.
| ✓ |
| Реализует модуль управления силовым агрегатом (PCM), содержащий модуль гибридного управления (HCM) и модуль управления двигателем (ECM). | ✓ |
| Реализует гибридный легковой автомобиль, который содержит двигатель, электрические объекты и ходовую часть подсистемы. | ✓ |
| Отображает эффективность уровня автомобиля, состояние заряда батареи (SOC), расход топлива и результаты выбросов, которые полезны для согласования силового агрегата и анализа выбора компонентов. |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и энергии на уровне компонентов и уровня системы. Для получения дополнительной информации о live скрипте, смотрите Анализ степени и энергии.
Скрипт обеспечивает:
Общие сводные данные по энергопотреблению, которую можно экспортировать в Excel® электронная таблица.
Engine объекта, электрический объект и ходовую часть эффективность объекта, включая гистограмму двигателя времени, проведенного в различных эффективностях объекта двигателя.
Логгирование данных так, чтобы вы могли использовать Данные Моделирования Inspector для анализа сигналов эффективности и передачи энергии силового агрегата.
Для получения дополнительной информации о live скрипте, смотрите Анализ степени и энергии.
The Drive Cycle Source блок генерирует целевую скорость транспортного средства для выбранного или заданного цикла привода. У пример готовых узлов есть эти опции.
| Выбор времени | Вариант | Описание |
|---|---|---|
Вывод шага расчета |
| Непрерывные команды оператора |
| Команды дискретного оператора |
The Longitudinal Driver подсистема генерирует нормированные команды ускорения и торможения. В примере готовых узлов есть эти варианты.
Варианты блока | Описание | ||
|---|---|---|---|
Продольный драйвер (по умолчанию) | Контроль |
| Управление ПИ с отслеживанием насыщения и передаточного усиления, которые являются функцией скорости транспортного средства. |
| Оптимальное одноточечное управление предпросмотром (посмотрите вперед). | ||
| Пропорционально-интегральное (PI) управление с отслеживанием коэффициентов усиления и feedforward. | ||
Lowpass (LPF) |
| Используйте LPF на целевой ошибке скорости для более плавного вождения. | |
| Не используйте фильтр при ошибке скорости. | ||
Сдвиг |
| Stateflow® график моделирует реверс, нейтраль и планирование сдвига передач привода. | |
| Входная передача, состояние транспортного средства и обратная связь скорости генерируют команды ускорения и торможения для отслеживания движения транспортного средства вперед и назад. | ||
| Коробка передач отсутствует. | ||
| Диаграмма Stateflow моделей заднюю, нейтральную, парковочную и N-ступенчатую передачу сдвига планирования. | ||
Разомкнутый контур | Подсистема управления разомкнутой системой. В подсистеме можно сконфигурировать команды ускорения, замедления, передачи и сцепления с постоянными или основанными на сигналах входами. | ||
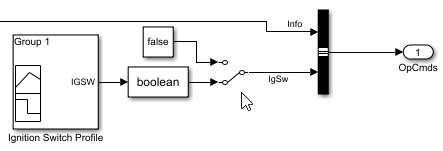
Чтобы простаивать двигатель в начале цикла привода и моделировать отключение катализатора перед перемещением транспортного средства с помощью команды pedal, используйте вариант Longitudinal Driver. Подсистема Продольного Драйвера включает профиль сигнала переключателя зажигания, IgSw. Контроллер двигателя использует сигнал переключателя зажигания, чтобы запустить и двигатель, и таймер выключения катализатора.
Таймер отключения катализатора переопределяет управление функцией останова двигателя (ESS) во время подсчета таймера отключения катализатора. Во время симуляции, после IgSw глубинное время достигает времени отключения катализатора CatLightOffTimeвозобновляется нормальная операция ESS. Если команды крутящего момента нет, прежде чем симуляция достигнет EngStopTimeESS отключает двигатель.
Для управления светом ESS и катализатора:
В Подсистеме Продольной Модели Драйвера установите профиль переключателя зажигания IgSw на 'on'.
В рабочей области моделей контроллеров двигателя установите эти параметры калибровки:
EngStopStartEnable - Включает ESS. Чтобы отключить ESS, установите значение false.
CatLightOffTime - Время простоя Engine от запуска двигателя до отключения катализатора.
EngStopTime - время работы двигателя ESS после отключения запроса крутящего момента модели драйвера.
The Controller подсистема имеет PCM с HCM и ECM.
У пример готовых узлов есть эти варианты для ECM.
| Контроллер | Вариант | Описание |
|---|---|---|
| ECM | SiEngineController (по умолчанию) | Контроллер двигателя с искровым зажиганием |
CiEngineController | Контроллер двигателя CI |
HCM реализует динамический встроенный контроллер, который непосредственно определяет рабочую точку двигателя, которая минимизирует расход топлива для конкретного тормоза (BSFC) при одновременном удовлетворении или превышении степени, требуемой подсистемами зарядки аккумулятора и подсистем силовой установки транспортного средства.
Чтобы вычислить оптимальную рабочую точку двигателя в скорости и крутящем моменте, контроллер начинает с потенциального набора дискретных уровней степени двигателя. Для каждого кандидата уровня степени блок имеет параметризованный вектор крутящего момента и рабочих точек скорости, которые минимизируют BSFC.
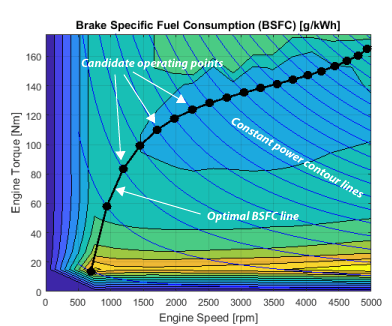
Затем оптимизатор удаляет кандидаты уровня мощности, которые неприемлемы по одной из следующих причин:
Слишком много степень отправлена через генератор в батарею.
Слишком мало степени, чтобы соответствовать требованиям к зарядке и подсистеме силовой установки.
Из остальных кандидатов уровня степени контроллер выбирает тот, с самым низким BSFC. Контроллер затем отправляет связанную команду крутящий момент/скорость рабочей точки в двигатель.
Для реализации легкового автомобиля Passenger Car подсистема содержит ходовую часть, электрические объекты и подсистемы двигателей. Чтобы создать свои собственные варианты двигателя для примера готовых узлов, используйте шаблоны проектов CI и двигателя с искровым зажиганием. У пример готовых узлов есть эти варианты подсистемы.
| Подсистема ходовой части | Вариант | Описание | |
|---|---|---|---|
Дифференциальный и податливость | All Wheel Drive | Сконфигурируйте ходовую часть для всех колес, передних колес или привода задних колес. Для варианта привода всех колес можно сконфигурировать тип крутящего момента муфты. | |
Front Wheel Drive (по умолчанию) | |||
Rear Wheel Drive | |||
Транспортное средство | Vehicle Body 3 DOF Longitudinal | Сконфигурировано для 3 степеней свободы | |
Колеса и тормоза |
| Для колес можно сконфигурировать тип:
Для эффективности и ясности, чтобы определить продольную силу каждого колеса, варианты реализуют блок Longitudinal Wheel. Чтобы определить общую продольную силу всех колес, действующих на ось, варианты используют коэффициент шкалы, чтобы умножить силу одного колеса на количество колес на оси. При помощи этого подхода для вычисления общей силы варианты предполагают равное скольжение шин и нагрузки на передней и задней осях, что является общим для продольных исследований силового агрегата. Если это не так, например, когда трение или нагрузки различаются с левой и правой стороны осей, используйте уникальные блоки Продольного колеса для вычисления независимых сил. Однако использование уникальных блоков для моделирования каждого колеса увеличивает сложность модели и вычислительные затраты. | |
| |||
| Электрический Объект подсистема | Вариант | Описание |
|---|---|---|
| Батарея | BattHevMm (по умолчанию) | Сконфигурировано с электрической батареей |
| Генератор | GenMapped (по умолчанию) | Отображенный генератор |
GenDynamic | Синхронный двигатель с внутренними постоянными магнитами (PMSM) с контроллером | |
| Двигатель | MotMapped (по умолчанию) | Отображенный двигатель с неявным контроллером |
MotDynamic | Синхронный двигатель с внутренними постоянными магнитами (PMSM) с контроллером |
| Подсистемы двигателей | Вариант | Описание | |
|---|---|---|---|
| Engine |
| Динамическое SI Core Engine с турбонагнетателем | |
| Динамический атмосферный двигатель СИ Core Engine | ||
| Динамический двухтурбинный одновпускной Engine СИ V | ||
| Динамический Engine СИ V | ||
| Динамический Engine СИ V с двумя-турбонаддувом с двумя входами | ||
| Mapped SI Engine с неявным турбонагнетателем | ||
| Глубокое обучение двигателя с искровым зажиганием | ||
| Динамическое CI Core Engine с турбонагнетателем | ||
| Mapped CI Engine с неявным турбонагнетателем | ||
[1] Higuchi, N., Shimada, H., Sunaga, Y. и Tanaka, M., Разработка новой двухмоторной подключаемой гибридной системы. Технический документ SAE 2013-01-1476. Warrendale, PA: SAE International Journal of Alternative Powertrains, 2013.
CI Controller | CI Core Engine | Datasheet Battery | Drive Cycle Source | Interior PM Controller | Interior PMSM | Longitudinal Driver | Mapped CI Engine | Mapped SI Engine | SI Controller | SI Core Engine
