The hybrid electric vehicle (HEV) P2 reference application represents a full HEV model with an internal combustion engine, transmission, battery, motor, and associated powertrain control algorithms. Use the reference application for hardware-in-the-loop (HIL) testing, tradeoff analysis, and control parameter optimization of a HEV P2 hybrid. To create and open a working copy of the reference application project, enter
By default, the HEV P2 reference application is configured with:Lithium-ion battery pack
Mapped electric motor
Mapped spark-ignition (SI) engine
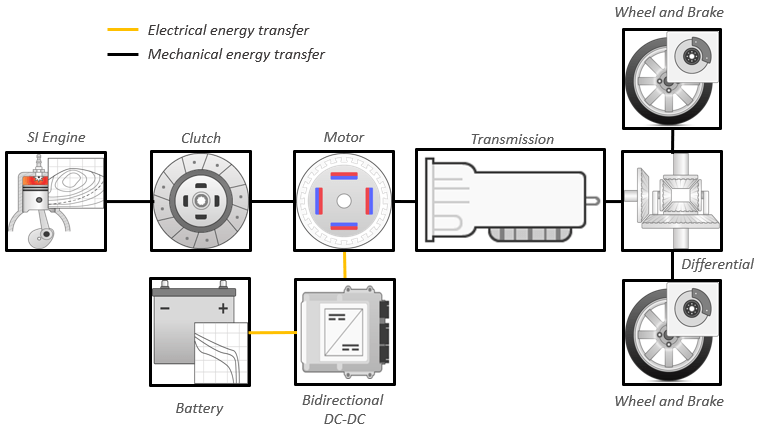
This diagram shows the powertrain configuration.
This table describes the blocks and subsystems in the reference application, indicating which subsystems contain variants. To implement the model variants, the reference application uses variant subsystems.
| Reference Application Element | Description | Variants |
|---|---|---|
Analyze Power and Energy |
Double-click Analyze Power and Energy to open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level. For more information about the live script, see Analyze Power and Energy. | NA |
Drive Cycle Source block — FTP75 (2474 seconds) | Generates a standard or user-specified drive cycle velocity versus time profile. Block output is the selected or specified vehicle longitudinal speed. | ✓ |
Environment subsystem | Creates environment variables, including road grade, wind velocity, and atmospheric temperature and pressure. | |
Longitudinal Driver subsystem |
Uses the Longitudinal Driver or Open Loop variant to generate normalized acceleration and braking commands.
| ✓ |
Controllers subsystem | Implements a powertrain control module (PCM) containing a P2 hybrid control module (HCM), an engine control module (ECM), and a transmission control module (TCM). | ✓ |
Passenger Car subsystem | Implements a hybrid passenger car that contains drivetrain, electric plant, and engine subsystems. | ✓ |
Visualization subsystem | Displays vehicle-level performance, battery state of charge (SOC), fuel economy, and emission results that are useful for powertrain matching and component selection analysis. |
Double-click Analyze Power and Energy to open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level. For more information about the live script, see Analyze Power and Energy.
The script provides:
An overall energy summary that you can export to an Excel® spreadsheet.
Engine plant, electric plant, and drivetrain plant efficiencies, including an engine histogram of time spent at the different engine plant efficiencies.
Data logging so that you can use the Simulation Data Inspector to analyze the powertrain efficiency and energy transfer signals.
For more information about the live script, see Analyze Power and Energy.
The Drive Cycle Source block generates a target vehicle velocity for a
selected or specified drive cycle. The reference application has these options.
| Timing | Variant | Description |
|---|---|---|
Output sample time |
| Continuous operator commands |
| Discrete operator commands |
The Longitudinal Driver subsystem generates normalized acceleration and
braking commands. The reference application has these variants.
Block Variants | Description | ||
|---|---|---|---|
Longitudinal Driver (default) | Control |
| PI control with tracking windup and feed-forward gains that are a function of vehicle velocity. |
| Optimal single-point preview (look ahead) control. | ||
| Proportional-integral (PI) control with tracking windup and feed-forward gains. | ||
Low-pass filter (LPF) |
| Use an LPF on target velocity error for smoother driving. | |
| Do not use a filter on velocity error. | ||
Shift |
| Stateflow® chart models reverse, neutral, and drive gear shift scheduling. | |
| Input gear, vehicle state, and velocity feedback generates acceleration and braking commands to track forward and reverse vehicle motion. | ||
| No transmission. | ||
| Stateflow chart models reverse, neutral, park, and N-speed gear shift scheduling. | ||
Open Loop | Open-loop control subsystem. In the subsystem, you can configure the acceleration, deceleration, gear, and clutch commands with constant or signal-based inputs. | ||
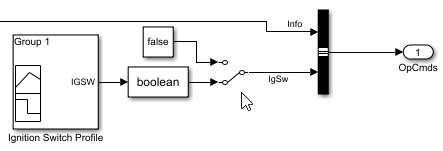
To idle the engine at the beginning of a drive cycle and simulate catalyst light-off before
moving the vehicle with a pedal command, use the Longitudinal Driver variant. The Longitudinal
Driver subsystem includes an ignition switch signal profile, IgSw. The engine
controller uses the ignition switch signal to start both the engine and a catalyst light-off
timer.
The catalyst light-off timer overrides the engine stop-start (ESS) stop function control
while the catalyst light-off timer is counting up. During the simulation, after the
IgSw down-edge time reaches the catalyst light-off time
CatLightOffTime, normal ESS operation resumes. If there is no torque
command before the simulation reaches the EngStopTime, the ESS shuts down the
engine.
To control ESS and catalyst light-off:
In the Longitudinal Driver Model subsystem, set the ignition switch profile
IgSw to 'on'.
In the engine controller model workspace, set these calibration parameters:
EngStopStartEnable — Enables ESS. To disable ESS, set the
value to false.
CatLightOffTime — Engine idle time from engine start to
catalyst light-off.
EngStopTime — ESS engine run time after driver model torque
request cut-off.
The Controller subsystem has a PCM containing an ECM, HCM, and TCM. The controller has these variants.
| Controller | Variant | Description | |
|---|---|---|---|
| ECM | SiEngineController (default) | Implements the SI Controller | |
CiEngineController | Implements the CI Controller | ||
| TCM |
| Implements the transmission controller | |
| HCM |
| Energy Management System | Implements the Equivalent Consumption Minimization Strategy |
Rule-Based Control | P2 Supervisory Control | Implements a dynamic supervisory controller that determines the engine torque, motor torque, starter, clutch, and brake pressure commands. | |
Regen Braking Control | Implements a parallel or series regenerative braking controller during rule-based control. | ||
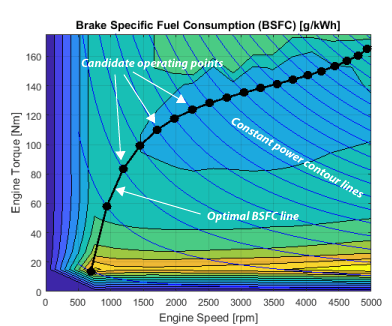
The HCM implements a dynamic supervisory controller that determines the engine torque, motor torque, starter, clutch, and brake pressure commands. Specifically, the HCM:
Converts the driver accelerator pedal signal to a torque request. The algorithm uses the optimal engine torque and maximum motor torque curves to calculate the total powertrain torque.
Converts the driver brake pedal signal to a brake pressure request. The algorithm multiplies the brake pedal signal by a maximum brake pressure.
Implements a regenerative braking algorithm for the traction motor to recover the maximum amount of kinetic energy from the vehicle.
Implements a virtual battery management system. The algorithm outputs the dynamic discharge and charge power limits as functions of battery SOC.
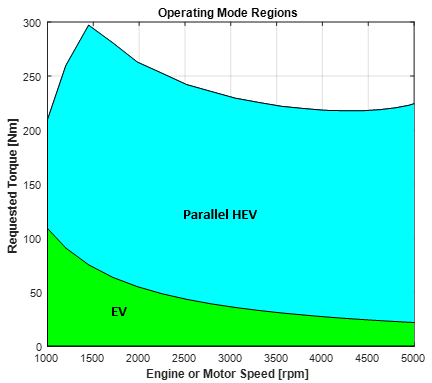
The HCM determines the vehicle operating mode through a set of rules and decision logic implemented in Stateflow. The operating modes are functions of motor speed and requested torque. The algorithm uses the calculated power request, accelerator pedal, battery SOC, and vehicle speed rules to transition between electric vehicle (EV) and parallel HEV modes.
| Mode | Description |
|---|---|
EV | Traction motor provides the torque request. |
Parallel HEV | The engine and the motor split the power request. Based on the target battery SOC and available kinetic energy, the HEV mode determines a charge sustain power level. The parallel HEV mode adds the charge sustain power to the engine power command. To provide the desired charge sustain power, the traction motor acts as a generator if charging is needed, and as a motor if discharging is needed. If the power request is greater than the engine power, the traction motor provides the remainder of the power request. |
Stationary | While the vehicle is at rest, the engine and generator can provide optional charging if battery SOC is below a minimum SOC value. |
The HCM controls the motor, and engine through a set of rules and decision logic implemented in Stateflow.
| Control | Description |
|---|---|
Engine |
|
Motor | A rule-based power management algorithm calculates a motor torque that does not exceed the dynamic power limits. |
To implement a passenger car, the Passenger Car subsystem
contains drivetrain, electric plant, and engine subsystems. To create your own
engine variants for the reference application, use the CI and SI engine project
templates. The reference application has these variants.
| Drivetrain Subsystem | Variant | Description | |
|---|---|---|---|
Differential and Compliance | All Wheel Drive | Configure drivetrain for all wheel, front wheel, or rear wheel drive. For the all wheel drive variant, you can configure the type of coupling torque. | |
Front Wheel Drive
(default) | |||
Rear Wheel Drive | |||
Torque Converter Automatic Transmission | Ideal Fixed Gear
Transmission | Configure locked and unlocked transmission efficiency with either a 1D or 4D (default) lookup table. | |
Torque Converter | Configure for external, internal (default), or no lockup. | ||
Vehicle | Vehicle Body 1 DOF
Longitudinal | Configured for 1 degrees of freedom | |
Wheels and Brakes |
| For the wheels, you can configure the type of:
For performance and clarity, to determine the longitudinal force of each wheel, the variants implement the Longitudinal Wheel block. To determine the total longitudinal force of all wheels acting on the axle, the variants use a scale factor to multiply the force of one wheel by the number of wheels on the axle. By using this approach to calculate the total force, the variants assume equal tire slip and loading at the front and rear axles, which is common for longitudinal powertrain studies. If this is not the case, for example when friction or loads differ on the left and right sides of the axles, use unique Longitudinal Wheel blocks to calculate independent forces. However, using unique blocks to model each wheel increases model complexity and computational cost. | |
| |||
Simscape Drivetrain. Another way to customize the drivetrain is to select a Simscape™ variant. This variant incorporates physical connections to provide a flexible way to assemble components.
Use the button in the top level of the reference application to toggle between Simscape and Powertrain Blockset variants of the drivetrain subsystem.
The reference application sets the appropriate solvers to optimize performance for each engine and drivetrain combination. Select the engine variant first, then select the drivetrain using the toggle button. If you select the drivetrain before changing the engine, you may encounter a solver error.
| Electric Plant Subsystem | Variant | Description |
|---|---|---|
Battery | BattHevP2 | Configured with Lithium Ion battery and DC-DC converter |
Low Voltage Starting System | StarterSystemP2 | Configured with a low voltage starting system |
Motor | MotMapped (default) | Mapped Motor with implicit controller |
MotDynamic | Interior permanent magnet synchronous motor (PMSM) with controller |
| Engine Subsystem | Variant | Description | |
|---|---|---|---|
| Engine |
| Dynamic SI Core Engine with turbocharger | |
| Mapped SI Engine with implicit turbocharger | ||
| Dynamic naturally aspirated SI Core Engine | ||
MathWorks® used the SI Core Engine and SI Controller to calibrate the hybrid control module (HCM). If you use the CI Core Engine and CI Controller variants, the simulation may error because the HCM does not use calibrated results.
MathWorks would like to acknowledge the contribution of Dr. Simona Onori to the ECMS optimal control algorithm implemented in this reference application. Dr. Onori is a Professor of Energy Resources Engineering at Stanford University. Her research interests include electrochemical modeling, estimation and optimization of energy storage devices for automotive and grid-level applications, hybrid and electric vehicles modeling and control, PDE modeling, and model-order reduction and estimation of emission mitigation systems. She is a senior member of IEEE®.
[1] Balazs, A., Morra, E., and Pischinger, S., Optimization of Electrified Powertrains for City Cars. SAE Technical Paper 2011-01-2451. Warrendale, PA: SAE International Journal of Alternative Powertrains, 2012.
[2] Onori, S., Serrao, L., and Rizzoni, G., Hybrid Electric Vehicles Energy Management Systems. New York: Springer, 2016.
CI Controller | CI Core Engine | Drive Cycle Source | Longitudinal Driver | Mapped CI Engine | Mapped Motor | Mapped SI Engine | SI Controller | SI Core Engine