Оцените 3-D ограничивающие рамки в облаке точек из 2-D ограничивающих рамок на изображении
bboxesLidar = bboxCameraToLidar(bboxesCamera,ptCloudIn,intrinsics,tform)ptCloudIn, из 2-D ограничивающих рамок в изображении, bboxesCamera. Функция использует внутренние параметры камеры, intrinsicsи камеру в матрицу преобразования лидара, tform, для оценки 3-D ограничивающих прямоугольников, bboxesLidar.
[ возвращает индексы точек облака точек, которые находятся внутри 3-D ограничивающих рамок с помощью входных параметров из предыдущего синтаксиса.bboxesLidar,indices] = bboxCameraToLidar(___)
[ указывает, для какого из заданных 2-D ограничивающих рамок функция обнаружила соответствующий 3-D ограничивающий прямоугольник в облаке точек.bboxesLidar,indices,boxesUsed] = bboxCameraToLidar(___)
[___] = bboxCameraToLidar(___, задает опции, использующие один или несколько аргументы пары "имя-значение" в дополнение к любой комбинации аргументов в предыдущих синтаксисах. Для примера, Name,Value)'ClusterThreshold',0.5 устанавливает порог Евклидова расстояния для дифференцирования кластеров облака точек равным 0,5 мировых единиц измерения.
Загрузите достоверные данные из MAT-файла в рабочую область. Извлеките изображение, данные облака точек и собственные параметры камеры из достоверных данных.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','bboxGT.mat'); gt = load(dataPath); im = gt.im; pc = gt.pc; intrinsics = gt.cameraParams;
Извлеките камеру в матрицу преобразования лидара из достоверных данных.
tform = gt.camToLidar;
Извлеките 2-D информацию об ограничивающем прямоугольнике.
bboxImage = gt.box;
Отобразите 2-D ограничивающий прямоугольник, наложенный на изображение.
annotatedImage = insertObjectAnnotation(im,'Rectangle',bboxImage,'Vehicle'); figure imshow(annotatedImage)

Оцените ограничивающий прямоугольник в облаке точек.
[bboxLidar,indices] = ... bboxCameraToLidar(bboxImage,pc,intrinsics,tform,'ClusterThreshold',1);
Отобразите 3-D ограничивающий прямоугольник, наложенный на облако точек.
figure pcshow(pc) xlim([0 50]) ylim([0 20]) showShape('cuboid',bboxLidar,'Opacity',0.5,'Color','green')

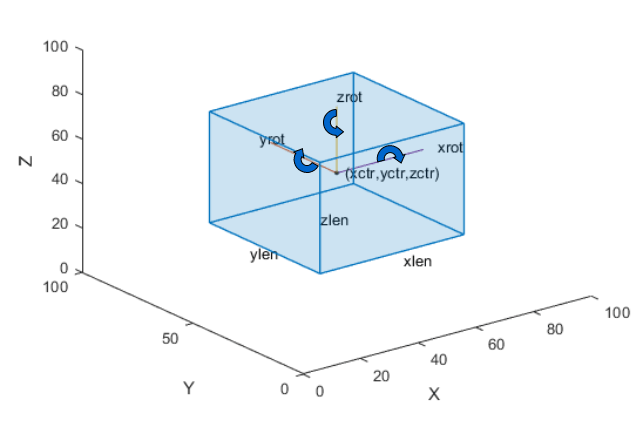
bboxesLidar - 3-D ограничительные рамки в лидарной системе координат3-D ограничительные прямоугольники в лидарной системе координат, возвращенные как N-на-9 матрица вещественных значений. N - количество обнаруженных 3-D ограничивающих рамок. У каждой строки матрицы есть форма [x центр y центр z гниль центра <reservedrangesplaceholder5> len <reservedrangesplaceholder4> len <reservedrangesplaceholder3> len <reservedrangesplaceholder2> y гниль z гниль].
x ctr, y ctr и z ctr - Эти значения определяют x -, y - и z - координаты оси, соответственно, центра кубоидного ограничивающего прямоугольника.
x len, y len и z len - Эти значения задают длину кубоида вдоль оси x -, y - и z - соответственно перед поворотом.
x гниль, y гниль и z гниль - Эти значения определяют углы поворота кубоида вокруг оси x -, y - и z - соответственно. Эти углы являются положительными по часовой стрелке при взгляде в прямом направлении их соответствующих осей.
Этот рисунок показывает, как эти значения определяют положение кубоида.
Типы данных: single | double
indices - Индексы точек внутри 3-D ограничивающих прямоугольниковИндексы точек в 3-D ограничивающих рамках, возвращенные в виде вектора-столбца или массива ячеек N-element.
Если функция обнаруживает только один 3-D ограничивающий прямоугольник в облаке точек, она возвращает вектор-столбец. Каждый элемент вектора является индексом облака точек, обнаруженным в 3-D ограничивающем прямоугольнике.
Если функция обнаруживает несколько 3-D ограничивающих рамок, она возвращает массив ячеек N -элемент. N - количество 3-D ограничивающих блоков, обнаруженных в облаке точек, и каждый элемент массива ячеек содержит индексы облака точек, обнаруженных в соответствующем 3-D ограничивающем прямоугольнике.
Типы данных: single | double
boxesUsed - Флаг обнаружения ограничивающего прямоугольникаФлаг обнаружения ограничивающего прямоугольника, возвращенный как M-вектор строка элемента логики. M - количество входа 2-D ограничивающих рамок. Если функция обнаруживает соответствующий 3-D ограничивающий прямоугольник в облаке точек, то она возвращает значение true для этого входа 2-D ограничивающий прямоугольник. Если функция не обнаруживает соответствующий 3-D ограничивающий прямоугольник, то она возвращает значение false.
Типы данных: logical
